

Manufacturing Spec Sheet - AUVAC
Manufacturing Spec Sheet - AUVAC
Manufacturing Spec Sheet - AUVAC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
www.vctinc.com<br />
VCT Family of<br />
Underwater Vehicles<br />
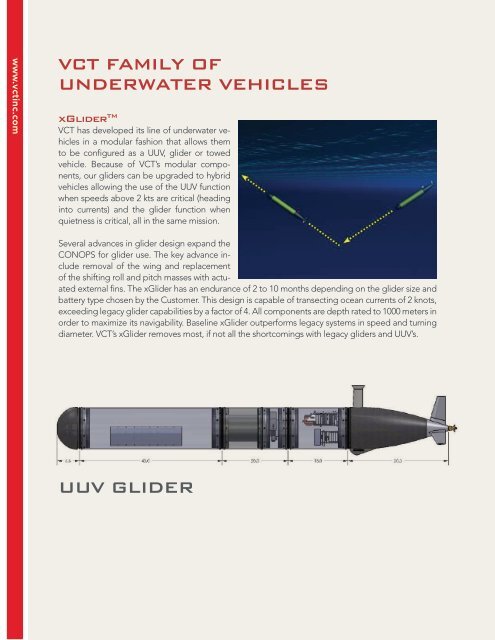
xGlider TM<br />
VCT has developed its line of underwater vehicles<br />
in a modular fashion that allows them<br />
to be configured as a UUV, glider or towed<br />
vehicle. Because of VCT’s modular components,<br />
our gliders can be upgraded to hybrid<br />
vehicles allowing the use of the UUV function<br />
when speeds above 2 kts are critical (heading<br />
into currents) and the glider function when<br />
quietness is critical, all in the same mission.<br />
Vehicle Command & Control<br />
& Autopilot Systems<br />
Several advances in glider design expand the<br />
CONOPS for glider use. The key advance include<br />
removal of the wing and replacement<br />
of the shifting roll and pitch masses with actuated<br />
external fins. The xGlider has an endurance of 2 to 10 months depending on the glider size and<br />
battery type chosen by the Customer. This design is capable of transecting ocean currents of 2 knots,<br />
exceeding legacy glider capabilities by a factor of 4. All components are depth rated to 1000 meters in<br />
order to maximize its navigability. Baseline xGlider outperforms legacy systems in speed and turning<br />
diameter. VCT’s xGlider removes most, if not all the shortcomings with legacy gliders and UUV’s.<br />
UUV Glider<br />
VCT’s vehicle software architecture is based on the ASTM F-41 international standard. It is open,<br />
object-oriented, scalable and applicable across all of the vehicles of interest in this community.<br />
The same VCT software is currently being used in 16 different UUV’s, gliders, and towed vehicles.<br />
References are available upon request. Flight hours from any vehicle using VCT’s vehicle software<br />
translate to increased reliability and robustness across all vehicles.<br />
In order to facilitate the use of VCT’s software on many different vehicles, key aspects of the software<br />
such as autopilot, device, and Vehicle Controller configuration are stored in configuration files, not<br />
hard-coded in the source.<br />
Integration of new sensors, autonomy modules, and command and control is facilitated by the<br />
object-oriented design of the vehicle software and its adherence to the ASTM F-41 architecture.<br />
Software robustness is assured through well-defined software development processes and thorough<br />
testing. Software testing includes both automated and manual testing at all scales from unit<br />
testing to full vehicle SITL, PITL, and HITL testing.<br />
VCT engineers combine aero/hydrodynamic engineering and software design work into a single,<br />
seamless process. Our software development utilizes the latest compilers, configuration<br />
management, issue tracking, and continuous integration software to produce robust and reliable<br />
vehicle software.









![Sonardyne Wideband Sub-Mini 6 [8270, 8271].pdf - AUVAC](https://img.yumpu.com/44408971/1/190x245/sonardyne-wideband-sub-mini-6-8270-8271pdf-auvac.jpg?quality=85)


