Very High Speed Counter Module - Esco Drives & Automation
Very High Speed Counter Module - Esco Drives & Automation
Very High Speed Counter Module - Esco Drives & Automation

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1-4 About the <strong>Very</strong> <strong>High</strong> <strong>Speed</strong> <strong>Counter</strong> <strong>Module</strong>s<br />
Absolute encoders typically have higher speed requirements (200 KHz<br />
typical) for motion control applications. An absolute encoder has a<br />
unique code associated with each position, so the exact position is<br />
always known, even if the system power is turned off.<br />
EXAMPLE<br />
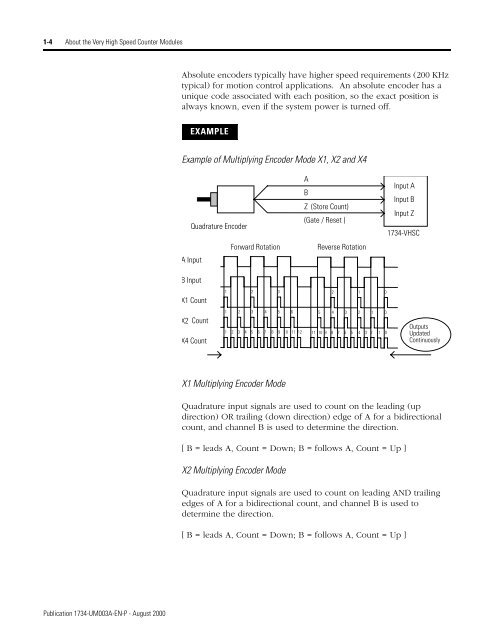
Example of Multiplying Encoder Mode X1, X2 and X4<br />
Quadrature Encoder<br />
Forward Rotation<br />
A Input<br />
B Input<br />
A<br />
B<br />
Z (Store Count)<br />
(Gate / Reset )<br />
Reverse Rotation<br />
Input A<br />
Input B<br />
Input Z<br />
1734-VHSC<br />
X1 Count<br />
1 2 3<br />
2 1 0<br />
X2 Count<br />
X4 Count<br />
1 2 3 4 5 6<br />
1 2 3 4 5 6 7 8 9 10 11 12<br />
5 4 3 2 1 0<br />
11 10 9 8 7 6 5 4 3 2 1 0<br />
Outputs<br />
Updated<br />
Continuously<br />
X1 Multiplying Encoder Mode<br />
Quadrature input signals are used to count on the leading (up<br />
direction) OR trailing (down direction) edge of A for a bidirectional<br />
count, and channel B is used to determine the direction.<br />
[ B = leads A, Count = Down; B = follows A, Count = Up ]<br />
X2 Multiplying Encoder Mode<br />
Quadrature input signals are used to count on leading AND trailing<br />
edges of A for a bidirectional count, and channel B is used to<br />
determine the direction.<br />
[ B = leads A, Count = Down; B = follows A, Count = Up ]<br />
Publication 1734-UM003A-EN-P - August 2000