Contact Dynamics Modelling for Robots
Contact Dynamics Modelling for Robots Contact Dynamics Modelling for Robots
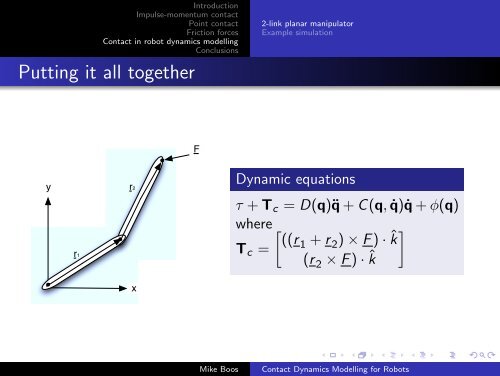
Introduction Impulse-momentum contact Point contact Friction forces Contact in robot dynamics modelling Conclusions Putting it all together 2-link planar manipulator Example simulation F y r1 r2 Dynamic equations τ + T c = D(q)¨q + C(q, ˙q) ˙q + φ(q) where[ ] ((r T c = 1 + r 2 ) × F ) · ˆk (r 2 × F ) · ˆk x Mike Boos Contact Dynamics Modelling for Robots
Introduction Impulse-momentum contact Point contact Friction forces Contact in robot dynamics modelling Conclusions Example simulation 2-link planar manipulator Example simulation Setup y 45˚ 1 m x Slender links of mass 1 kg, length 1 m Initially at rest End effector radius: 5 cm Contact properties of end effector and wall similar to that of steel for Hunt-Crossley τ 1 = −10Nm, τ 2 = −2Nm Mike Boos Contact Dynamics Modelling for Robots
- Page 1 and 2: Introduction Impulse-momentum conta
- Page 3 and 4: Outline Introduction Impulse-moment
- Page 5 and 6: Introduction Impulse-momentum conta
- Page 7 and 8: Outline Introduction Impulse-moment
- Page 9 and 10: Introduction Impulse-momentum conta
- Page 11 and 12: Introduction Impulse-momentum conta
- Page 13 and 14: Outline Introduction Impulse-moment
- Page 15 and 16: Hertz theory Introduction Impulse-m
- Page 17 and 18: Introduction Impulse-momentum conta
- Page 19 and 20: Introduction Impulse-momentum conta
- Page 21 and 22: Introduction Impulse-momentum conta
- Page 23 and 24: Outline Introduction Impulse-moment
- Page 25 and 26: Introduction Impulse-momentum conta
- Page 27 and 28: Introduction Impulse-momentum conta
- Page 29: Link 1 Introduction Impulse-momentu
- Page 33 and 34: Introduction Impulse-momentum conta
- Page 35: Introduction Impulse-momentum conta
Introduction<br />
Impulse-momentum contact<br />
Point contact<br />
Friction <strong>for</strong>ces<br />
<strong>Contact</strong> in robot dynamics modelling<br />
Conclusions<br />
Putting it all together<br />
2-link planar manipulator<br />
Example simulation<br />
F<br />
y<br />
r1<br />
r2<br />
Dynamic equations<br />
τ + T c = D(q)¨q + C(q, ˙q) ˙q + φ(q)<br />
where[ ]<br />
((r<br />
T c = 1 + r 2 ) × F ) · ˆk<br />
(r 2 × F ) · ˆk<br />
x<br />
Mike Boos<br />
<strong>Contact</strong> <strong>Dynamics</strong> <strong>Modelling</strong> <strong>for</strong> <strong>Robots</strong>


