Dissipative Descent: Rocking and Rolling down an incline
Dissipative Descent: Rocking and Rolling down an incline
Dissipative Descent: Rocking and Rolling down an incline

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
cs <strong><strong>an</strong>d</strong><br />
BC<br />
<strong>Dissipative</strong> <strong>Descent</strong>: <strong>Rocking</strong> <strong><strong>an</strong>d</strong><br />
ommerfeld Rock’n’roll Experiments Contact Conclusions<br />
<strong>Rolling</strong> <strong>down</strong> <strong>an</strong> <strong>incline</strong><br />
ore<br />
Bill Young, Neil Balmforth,<br />
John Bush & David Vener<br />
hn<br />
<strong><strong>an</strong>d</strong>
The snail ball from “Gr<strong><strong>an</strong>d</strong> Illusions” - $50
“A small metallic gold ball just over 2cm in diameter ... the ball does roll, but does so<br />
incredibly slowly. To <strong>an</strong> audience it seems baffling ... inside the ball, which is actually<br />
hollow, there is a viscous liquid <strong><strong>an</strong>d</strong> a smaller ball which is heavy... it is the smaller heavier<br />
ball which determines the pace <strong><strong>an</strong>d</strong> this is slow because of the viscous liquid.”
The Snail Cylinder from UBC - $10,000
le Oce<strong>an</strong>ographic Institution, (Received for ?? <strong><strong>an</strong>d</strong> assist<strong>an</strong>ce in revised in building form ??)<br />
2 the snail cylinder.<br />
Department of Applied Mathema<br />
The state of the snail cylinder is specified by<br />
3 Scripps Institution of Oce<strong>an</strong>ography, La Jolla<br />
ppendix A. ɛ(t) Derivation , χ(t) of , theΩ equations a (t) , <strong><strong>an</strong>d</strong> of motion Ω b (t)<br />
(Received ?? <strong><strong>an</strong>d</strong> in revised fo<br />
A.1. Geometry<br />
e geometry is shown in Figure 1. We use a Cartesi<strong>an</strong> coordinate system attac<br />
The flow in the gap is<br />
l<strong>an</strong>e which is <strong>incline</strong>d at <strong>an</strong> <strong>an</strong>gle α to the –g<br />
Ω b<br />
ɛ(t)<br />
horizontal;<br />
, χ(t)<br />
the unit vector î points<br />
<strong>an</strong>alyzed , Ωwith a (t) , the <strong>an</strong><br />
Ω a<br />
α<br />
lubrication approximation.<br />
<strong>Rocking</strong> <strong>Rocking</strong> b& −rolling<br />
a = δ& ≪rolling<br />
a<br />
φ (<br />
B χ<br />
g = −g sin α î − cos α ˆk<br />
)<br />
arr<strong>an</strong>gement. arr<strong>an</strong>gement. In total, In the total, apparatus the apparatus has . mass, has mass,<br />
A<br />
e slope <strong><strong>an</strong>d</strong> the unit normal ˆk is perpendicular to the pl<strong>an</strong>e. The unit vecto<br />
o the page in Figure 1, <strong><strong>an</strong>d</strong> clockwise rotations are positive. The position ve<br />
= Xî + Zˆk <strong><strong>an</strong>d</strong> the gravitational acceleration is −g, where<br />
<strong>Rocking</strong> & rolling 3<br />
. In total, the apparatus has mass,<br />
φ = α + χ<br />
M ≡ m<br />
this (X, Z)-coordinate system, the two cylinders have centres a<br />
M<br />
+ m<br />
≡ b<br />
at m<br />
+ m<br />
a the + f .<br />
mpositions,<br />
b + m f .<br />
î + Z aˆk <strong><strong>an</strong>d</strong> Xb = X<br />
M O<br />
b î +<br />
≡<br />
Z<br />
m<br />
The reduced bˆk, mass a + respectively.<br />
m<br />
of b + m<br />
the inner f . The cylinder requirement is m that the outer cy<br />
lls without slipping <strong>down</strong><br />
The<br />
the<br />
reduced<br />
pl<strong>an</strong>e dictates<br />
mass of<br />
that<br />
the inner cylinder ′ a ≡ m<br />
is a −<br />
m ′ m<br />
a ≡ ′′ (2.1<br />
a , wh<br />
m a<br />
mass of the inner displaced<br />
displaced cylinder massis of<br />
mass m fluid. ′<br />
a ≡of mfluid.<br />
a − m ′′<br />
a , where m ′′<br />
a ≡ πa 2 Lρ is th<br />
ss of fluid.<br />
The mathematical ˙ formulation of the model consists of equa<br />
The C mathematical X b = bΩ b , formulation Z b = b .<br />
positions <strong><strong>an</strong>d</strong> rotations of the cylinders, plus of the model Navier-Stokes consis<br />
ematical formulation<br />
ometry implies that the positions of the model<br />
Appendixcenter A summarizes <strong><strong>an</strong>d</strong> of the α rotations consists<br />
inner the cylinder full of of the equations<br />
formulation iscylinders, of motion<br />
given byof plus the problem. the forNav<br />
the<br />
d rotations of the<br />
formulation<br />
cylinders, Appendix in<br />
plus<br />
all Aits summarizes the<br />
glory,<br />
Navier-Stokes<br />
but ( introduce the full equations<br />
the formulation ) Stokes approxima<br />
the of fluid the<br />
summarizes the part full Xformulation of a = the formulation Xdynamics. b + ɛ, in<br />
of<br />
all However, ɛ ≡the itsɛ<br />
glory,<br />
problem. sin because χ î but + cos the We<br />
introduce χarr<strong>an</strong>gement ˆk do . not<br />
the<br />
attack<br />
Stokes as a who thi<br />
a<br />
in all its glory, <strong>incline</strong>, but introduce some subtlety the Stokes is required approximation because oneto c<strong>an</strong> simply impose the the fluid ap<br />
k^<br />
^
th<strong>an</strong>k Keith Bradley of the Coastal Research Laboratory, Woods<br />
Institution, for assist<strong>an</strong>ce in building the snail cylinder.<br />
are d’Alembert forces arising because the position of the center of the outer cyl<br />
which the coordinates ɛ <strong><strong>an</strong>d</strong> χ are<br />
2.1. The equations of The<br />
referred,<br />
equations<br />
does not lieof in <strong>an</strong><br />
motion<br />
inertial frame. The<br />
of the inner The cylinder configuration followsofrom<br />
the apparatus is specified by four independent variab<br />
Ω a (t) <strong><strong>an</strong>d</strong> Ω b (t). The dynamical considerations of Appendix A indicate th<br />
–g<br />
1<br />
of the inner cylinder is determined 2 m aa 2 ˙Ωa by = theT a equations , of motion,<br />
α<br />
( )<br />
where T<br />
m a + m′′ 2<br />
a is the fluid torque.<br />
a<br />
Assuming<br />
(ɛ¨χ + 2 ˙ɛ ˙χ) = f χ + m ′ a<br />
m g sin φ − m′ a b ˙Ω b cos χ ,<br />
B χ<br />
that the outer cylinder f<br />
rolls without sliding <strong>down</strong> the <strong>incline</strong>d p<br />
A<br />
equation of motion of the outer cylinder c<strong>an</strong> be similarly broken <strong>down</strong>. Imp<br />
those equations contain<br />
O<br />
the<br />
(<br />
forces at<br />
)<br />
m a + m′′ 2 the contact point with the pl<strong>an</strong>e, which<br />
a<br />
eliminate from the problem algebraically (¨ɛ −given ɛ ˙χ 2 ) = that f ɛ −the m ′<br />
m<br />
ag rotation cos φ − rate, m ′ ab ˙Ω b Ωsin b , also χ ,<br />
C<br />
4 N. J. Balmforth, f J. W. M. Bush, D. Vener <strong><strong>an</strong>d</strong> W. R. Youn<br />
the dist<strong>an</strong>ce rolled. This leaves a single equation for Ω b (t), as described in App<br />
α<br />
where fAlternatively, χ <strong><strong>an</strong>d</strong> f ɛ represent the totalthe <strong>an</strong>gular fluidmomentum forces in bal<strong>an</strong>ce, the direction of the line<br />
perpendicular<br />
[<br />
to that direction, respectively.<br />
(<br />
The)<br />
second terms on the]<br />
rig<br />
d 1<br />
(2.3) denote the Archimede<strong>an</strong> buoy<strong>an</strong>cy force on the inner cylinder, <strong><strong>an</strong>d</strong><br />
dt<br />
2 m aa 2 Ω a + (M + m b )b 2 Ω b + m a + m′′ 2<br />
a<br />
ɛ 2 ˙χ + m ′ a<br />
m b d f dt (ɛ sin χ) are d’Alembert forces arising because the position of the center of the out<br />
which the coordinates ɛ <strong><strong>an</strong>d</strong> χ are referred,<br />
+m ′ does not lie in <strong>an</strong> inertial frame<br />
ab ˙Ω b ɛ cos χ ≈ Mgb sin α + m ′ agɛ sin φ ,<br />
Recall: of the inner cylinder follows from<br />
rivation of the equations of motion<br />
Ω b<br />
Ω a<br />
φ<br />
A.1. Geometry<br />
wn in Figure 1. We use a Cartesi<strong>an</strong> coordinate system attached to<br />
ined at <strong>an</strong> <strong>an</strong>gle α to the horizontal; the unit vector î points <strong>down</strong><br />
nit normal ˆk is perpendicular to the pl<strong>an</strong>e. The unit vector ĵ is<br />
ure 1, <strong><strong>an</strong>d</strong> clockwise rotations are positive. The position vector is<br />
he gravitational acceleration is −g, where<br />
(<br />
g = −g sin α î − cos α ˆk<br />
)<br />
. (A 1)<br />
k^<br />
^<br />
inate system, the two cylinders have centres at the positions, X a =<br />
= X b î + Z bˆk, respectively. The requirement that the outer cylinder<br />
g <strong>down</strong> the pl<strong>an</strong>e dictates that<br />
X˙<br />
b = bΩ b , Z b = b . (A 2)<br />
at the center of the inner cylinder is given by<br />
(<br />
)<br />
X a = X b + ɛ, ɛ ≡ ɛ sin χ î + cos χ ˆk . (A 3)<br />
where φ = α+χ, which provides <strong>an</strong> equivalent equation. Though (2.2)-(2.4)<br />
The only<br />
final relation (2.5) contains our 1first 2 m approximation<br />
aa 2 ˙Ωa = T<br />
approximation<br />
a ,<br />
by neglecting the int<br />
(so far)<br />
momentum of the fluid in the frame of its centre of mass.<br />
As the Stokes approximation describes the flow in the <strong>an</strong>nular gap, the fl<br />
etween the centers A <strong><strong>an</strong>d</strong> B is denoted by ɛ(t), <strong><strong>an</strong>d</strong> χ(t) is the <strong>an</strong>gle<br />
centers <strong><strong>an</strong>d</strong> the Z-axis. We denote the <strong>an</strong>gle between the line of<br />
ction of gravity by φ(t) ≡ α + χ(t).<br />
s of the fluid is<br />
∫<br />
where T is the fluid torque.<br />
The Assuming lubrication a state approximation that<br />
of inst<strong>an</strong>t<strong>an</strong>eous<br />
the outer the cylinder<br />
force gap bal<strong>an</strong>ce. expresses rolls<br />
The<br />
without the forces, hydrodynamic sliding<br />
f ɛ <strong><strong>an</strong>d</strong> f<br />
<strong>down</strong> χ , <strong><strong>an</strong>d</strong><br />
the<br />
torque,<br />
incli<br />
T<br />
equation forces computed <strong><strong>an</strong>d</strong> oftorques as<br />
motionin functions<br />
of terms theof of<br />
outer the the four inst<strong>an</strong>t<strong>an</strong>eous geometrical arr<strong>an</strong>gement (i.e.<br />
cylinder independent c<strong>an</strong> variables. be similarly broken <strong>down</strong><br />
those equations contain the forces at the contact point with the pl<strong>an</strong>e,<br />
velocities of the cylinder surfaces (given by Ω a , Ω b , ˙ɛ <strong><strong>an</strong>d</strong> ˙χ). We do this v
inner centres cylinder of (i.e., the with on cylinders κ point ≡ Aare in not figure moving, 1). The <strong><strong>an</strong>d</strong> <strong>an</strong>gle position θ is measured a polar c<br />
ρνu ɛ/δ. zz = The a<br />
nterclockwise at the inner direction cylinder with(i.e., θ = −1 result p θ , (Bp 6) z = is0,<br />
obtained 1<br />
on 0 running point Aalong in figure a u using<br />
θ h(θ) + w the z = 0 integrals: .<br />
∮<br />
the∮<br />
δ − ɛ cos θ<br />
dθ<br />
line 1). The of centers, <strong>an</strong>gle through Lubrication theThese counterclockwise narrowest must<br />
where in<br />
bethe solved<br />
δ ≡point gap:<br />
subject<br />
b −direction use of a the to<br />
≪ the<br />
a. gap. velocity<br />
with We c. Then of then θ m.<br />
boundary<br />
= the frame 0use gap running<br />
conditions<br />
a width of ‘gap the along coordinate h(θ) fluid.<br />
theis the<br />
cylind<br />
1 − κ cos θ = 2π<br />
√ ,<br />
dθ<br />
app lin<br />
In our new frame of reference, the fluid flow 1 − κ<br />
2 (1 − κ cos θ)<br />
is dictated by the motions 2 = (1<br />
of<br />
passing cylinders. through soThese that <strong><strong>an</strong>d</strong> ~ the narrowest point of the gap. Then the gap wid<br />
b#<br />
motions<br />
b<br />
(z, θ) c<strong>an</strong> h(θ) = be (0, = divided 0) δ −is into ɛthe cos the θ point , rotations, O ˜Ω in a = Figure Ω a − ˙φ <strong><strong>an</strong>d</strong> 1. ˜Ω b =<br />
∮<br />
<strong><strong>an</strong>d</strong> a “squeeze<br />
To a # ~ flow” which the cylinder movedθ<br />
towards each other with a s<br />
a leading r=a+z order in δ/a, h(θ) the= lubrication δ − ɛ cos θ , equation<br />
≡ b − asqueezing ≪ a. We outthen fluid usefrom a ‘gap the narrowest coordinate’, part of0 the zgap. To h(θ), easedefined the constru by<br />
(1 − κ cos θ) 3 = π(2 + κ2 )<br />
(1 − κ 2 ) . 5/2<br />
the fluid forces <strong><strong>an</strong>d</strong> torques, we split the lubrication problem into these two pa<br />
d ! /dt<br />
d ! /dt<br />
(z, θ) where = (0, 0) δ ≡is bthe Returning − apoint P<br />
≪ a. to OWe (Bin 5), then Figure <strong><strong>an</strong>d</strong>use eliminating 1. a ‘gapq ρνu<br />
coordinate’, 0 z h<br />
zz = a −1 with (B 6), we obtain<br />
construct the full solution via linear superposition. p θ , p z = 0,<br />
adingso order that Bin (z, δ/a, θ) " = the (0, lubrication 0) is the point equations O in Figure take the1.<br />
form<br />
[ ( ) ]<br />
! A O B.1. The p<br />
To leading order in δ/a, the R<br />
θ (θ) rotational = 12a2 ρν<br />
flow, u<br />
lubrication equations take the fo<br />
~<br />
b# ~<br />
b<br />
ρνu<br />
a # zz = a −1 1<br />
R (z, θ)<br />
h 3 (˜Ω a + ˜Ω h 1 − κ<br />
2<br />
b )<br />
2 − 2 + κ 2 δ<br />
To leading order, the boundary p θ , conditions p z = 0, are<br />
a<br />
These must be solved subject to the velocity bound<br />
In our new frame<br />
ρνu zz = a −1 of reference, a u θ + w z = 0 .<br />
u<br />
the fluid 1<br />
p θ , p z = 0,<br />
d ! /dt<br />
a u flow is<br />
R (0, θ) = a˜Ω a , w R B.2. The<br />
(0, θ) = 0 , <strong><strong>an</strong>d</strong> u R squeeze flow, u<br />
(h, θ) = a˜Ω b , w S R (z, θ)<br />
(h,<br />
θ +<br />
θ) =<br />
w0 . z =<br />
ust be solvedcylinders. subject The boundary toThese the condition velocity motions are boundary c<strong>an</strong> beconditions divided into on the cyli rot<br />
The solution is<br />
r newThese framemust <strong><strong>an</strong>d</strong> of reference, be a u S solved “squeeze (0, θ) = the wsubject S (0, ( fluid flow” θ) = to flow in thewhich isvelocity dictated theboundary by cylinder motions conditio move<br />
rs. The These rotational<br />
Inmotions oursqueezing part:<br />
newc<strong>an</strong> frame be u R (z, divided θ) = 1<br />
out of the reference, into −<br />
fluid z ) 0 , <strong><strong>an</strong>d</strong><br />
the a˜Ω<br />
from the rotations, fluid the narrowest flow ˜Ω a = isΩdictated a −part ˙φ <strong><strong>an</strong>d</strong>of<br />
by ˜Ω a + z u S (h, θ) = ˙ɛ sin θ , w S (h,<br />
h h a˜Ω b −<br />
pR θ<br />
z(h − z) .<br />
from which it follows that<br />
2aρν b<br />
“squeeze cylinders. flow”<br />
the<br />
in These fluid<br />
which motions forces<br />
the cylinder c<strong>an</strong> <strong><strong>an</strong>d</strong>be torques, divided move towards<br />
we intosplit theeach rotations, the<br />
other<br />
lubricatio<br />
with ˜Ω a =<br />
ng The out squeeze<br />
<strong><strong>an</strong>d</strong><br />
the<br />
a<br />
fluid part:<br />
“squeeze<br />
from the<br />
construct flow”<br />
narrowest u S (z, θ) = z<br />
the in full which<br />
part ˙ɛ sin θ<br />
solution the<br />
of −<br />
cylinder<br />
the pS θ<br />
h gap.<br />
via 2aρνlinear z(h − move z) To ease<br />
superposition. towards <strong><strong>an</strong>d</strong> the pS cons (θ) =<br />
eac<br />
d forces<br />
squeezing<br />
<strong><strong>an</strong>d</strong> torques,<br />
out the<br />
we<br />
fluid<br />
split<br />
from<br />
the lubrication<br />
the narrowest<br />
problem<br />
part of<br />
into<br />
the<br />
these<br />
gap.<br />
two<br />
B.3. Forces <strong><strong>an</strong>d</strong> torques To<br />
The ct the pressure the<br />
full<br />
fluid<br />
solution follows forces<br />
via<br />
<strong><strong>an</strong>d</strong><br />
linear<br />
torques,<br />
superposition.<br />
Because from global the hydrodynamic mass conservation. we split forceB.1. Integration is the dominated lubrication Theround rotational by the the problem lubrication inner flowi<br />
cylinder<br />
construct<br />
gives the forces ∮<br />
the full<br />
<strong><strong>an</strong>d</strong> torques.<br />
B.1. solution The rotational via linear flow, superposition.<br />
u R (z, θ)<br />
To leading order, the boundary conditions are<br />
F a = −aL<br />
p(θ)(ˆɛ cos θ + ˆχ sin θ) dθ ≡ f ɛˆɛ + f
total <strong>an</strong>gular momentum dt bal<strong>an</strong>ce, f<br />
2.1. The equations of motion m f dt<br />
m a a 2 Ω a + (M + m(<br />
b )b 2 Ω )<br />
]<br />
The configuration(<br />
b + m a + m′′ 2<br />
a<br />
ɛ<br />
of<br />
M + m b )b 2 Ω b + m a + m′′ the2<br />
apparatus )<br />
2 ˙χ + m ′<br />
a<br />
ɛ ˙χ + m ′ a<br />
m b d a<br />
m is specified b d +m ′ ab ˙Ω b ɛ cos χ ≈ Mgb sin α + m<br />
(ɛ sin χ)<br />
by four independent<br />
f dt (ɛ sin χ) +m ′ ab ˙Ω<br />
variables, ɛ(t), χ(t),<br />
Ω b ɛ cos χ ≈ Mgb sin α + m ′ a (t) <strong><strong>an</strong>d</strong> Ω b (t). The agɛ sin φ ,<br />
m<br />
dynamical considerations of Appendix A indicate that the position<br />
a + m′′ 2 f where φ = α+χ, dt which provides <strong>an</strong> equivalent equation. Though<br />
a<br />
(¨ɛ final<br />
The − ɛrelation ˙χ 2 ) full = f ɛ<br />
(2.5)<br />
Monty − m ′ contains<br />
of the inner cylinder where is φ determined = m<br />
ag cos φ − m our ′ first<br />
ab ˙Ω b sinapproximation χ , (2.3) by neglect<br />
+m ′ ab ˙Ω b f α+χ, ɛ cosmomentum χwhich ≈by Mgb theprovides sin equations ofα + m <strong>an</strong> fluid ′ agɛ of equivalent motion, sin the φ , frame equation. of(2.5)<br />
its centre Though of mass. (2.2)-(2.4)<br />
(<br />
+m ′ final<br />
ab ˙Ω relation )<br />
φ = α+χ, where which f χ provides <strong><strong>an</strong>d</strong> f ɛ represent <strong>an</strong> equivalent (2.5) contains<br />
b ɛ cos χ ≈ Mgb sin α + m ′ our first approximation by neglecting the int<br />
momentum of the fluid agɛ<br />
the<br />
sin<br />
frame<br />
φ ,<br />
of its centre<br />
(2.5)<br />
m a + m′′ 2 the equation. fluid As the forces Stokes<br />
Though in approximation the(2.2)-(2.4) directionare of describes<br />
a<br />
(ɛ¨χ + 2 ˙ɛ ˙χ) = f χ + m ′ a<br />
of mass.<br />
which provides <strong>an</strong> equivalent m<br />
As the equation. Stokes approximation Though (2.2)-(2.4) g sin describes are φ − exact, m′ a b ˙Ω<br />
exact, the line this<br />
the of flow centres the <strong><strong>an</strong>d</strong><strong>an</strong>nular<br />
elation perpendicular (2.5) contains to our that firstdirection, approximation<br />
arespectively. state of<br />
by<br />
inst<strong>an</strong>t<strong>an</strong>eous<br />
neglecting The second the<br />
force terms intrinsic<br />
bal<strong>an</strong>ce. on b cos <strong>an</strong>gular theThe χ right , forces, of (2.2) f ɛ (2.2) <strong><strong>an</strong>d</strong> <strong><strong>an</strong>d</strong>f χ , <strong><strong>an</strong>d</strong><br />
ntum of(2.3) the fluid denote in the frame Archimede<strong>an</strong> of f<br />
its centre buoy<strong>an</strong>cy computed<br />
of mass. force as functions the inner of the the cylinder, inst<strong>an</strong>t<strong>an</strong>eous flow this<br />
<strong><strong>an</strong>d</strong> the the <strong>an</strong>nular geometrical final terms gap, arr<strong>an</strong>ge the fl<br />
he ) contains Stokes areapproximation d’Alembert our first approximation ( aforces state describes arising of inst<strong>an</strong>t<strong>an</strong>eous the ) because velocities<br />
flow by neglecting the<br />
of<br />
force position <strong>an</strong>nular<br />
the the bal<strong>an</strong>ce.<br />
cylinder<br />
gap, of intrinsic the the<br />
surfaces<br />
The center fluid <strong>an</strong>gular forces, remains of (given thef ɛ outer by<br />
<strong><strong>an</strong>d</strong> in<br />
Ω<br />
fcylinder, a , Ω<br />
χ , <strong><strong>an</strong>d</strong> b , ˙ɛ <strong><strong>an</strong>d</strong><br />
torque, ˙χ). W<br />
T<br />
e fluid the frame ofcomputed its centre as of functions mass. of the inst<strong>an</strong>t<strong>an</strong>eous geometrical arr<strong>an</strong>gement (i.e.<br />
m<br />
pproximation describes velocities the a + m′′ 2<br />
of inst<strong>an</strong>t<strong>an</strong>eous which the coordinates force bal<strong>an</strong>ce. ɛ <strong><strong>an</strong>d</strong> The a χforces, are theory, referred, f<br />
as<br />
(¨ɛ − ɛ ˙χ<br />
flowof the thecylinder <strong>an</strong>nular 2 ɛ <strong><strong>an</strong>d</strong><br />
outlined does f<br />
) = f ɛ − χ , <strong><strong>an</strong>d</strong> notin m<br />
surfaces gap, the ′ torque, lieAppendix T<br />
m<br />
ag cos φ − m<br />
(given fluid remains ′ a inertial , c<strong>an</strong><br />
ab<br />
by Ω ˙Ω<br />
B,<br />
then<br />
because frame. be The ourrotation<br />
snail cylinder<br />
b sin χ , (2.3)<br />
ted as functions of the inner of the cylinder inst<strong>an</strong>t<strong>an</strong>eous follows f<br />
from geometrical<br />
gaps, although<br />
arr<strong>an</strong>gement<br />
more general<br />
(i.e.<br />
results<br />
ɛ <strong><strong>an</strong>d</strong> a , in<br />
exist<br />
Ωχ) b , <strong><strong>an</strong>d</strong><br />
(Finn & Cox 2002).<br />
˙ɛ <strong><strong>an</strong>d</strong> ˙χ). We do this v<br />
<strong>an</strong>eous ies of the force cylinder bal<strong>an</strong>ce. 4 surfaces theory, TheN. (given forces, J. asBalmforth, by outlined f ɛ Ω<strong><strong>an</strong>d</strong> a , Ωf b χ , in J. , W. Appendix M. torque, Bush, B, TD. a , because c<strong>an</strong> Vener then <strong><strong>an</strong>d</strong> our be<br />
where f W. snail R. cylinders Young have rela<br />
χ <strong><strong>an</strong>d</strong> f ɛ represent the fluid<br />
1forces in the direction of the line of centres <strong><strong>an</strong>d</strong><br />
ctions of the inst<strong>an</strong>t<strong>an</strong>eous gaps, although geometrical more arr<strong>an</strong>gement<br />
2 m ˙ɛ <strong><strong>an</strong>d</strong><br />
aa 2 ˙χ). We<br />
˙Ωa = T2.2. do<br />
general results (i.e. a , Lubrication<br />
this via lubrication<br />
approximation <strong><strong>an</strong>d</strong> (2.4) a reduced<br />
, as outlined Appendix B, because our snail cylinders have exist ɛ <strong><strong>an</strong>d</strong> relatively<br />
perpendicular (Finn χ) <strong><strong>an</strong>d</strong> & narrow Cox 2002).<br />
Alternatively, to that the direction, total <strong>an</strong>gular respectively. momentum The second bal<strong>an</strong>ce, terms on the right of (2.2) <strong><strong>an</strong>d</strong><br />
although ylinder (2.3) where surfaces more<br />
denote Tgeneral a is [(given theresults fluid Archimede<strong>an</strong> by torque. Ωexist a , Ω b<br />
(Finn<br />
In lubrication<br />
, buoy<strong>an</strong>cy ˙ɛ <strong><strong>an</strong>d</strong> & Cox ˙χ). force ( We 2002).<br />
approximation (δ ≡ (b − a) ≪ a), the fluid forces<br />
T<br />
do on this the inner ) via lubrication<br />
a , take the form (see Appendix cylinder, B), <strong><strong>an</strong>d</strong> the]<br />
final terms<br />
ed in Appendix d B, because our snail cylinders 2.2. Lubrication have relatively approximation narrow<strong><strong>an</strong>d</strong> a reduced model<br />
1<br />
ore general results dt<br />
2 m exist aa<br />
In 2 Ω<br />
lubrication (Finn a + (M<br />
&<br />
+<br />
Cox<br />
m<br />
approximation b )b<br />
2002).<br />
2 Ω b + m a + m′′ 2<br />
areAssuming d’Alembert that forces thearising outer cylinder because the rollsposition withoutof sliding<br />
a the<br />
ɛ<br />
(δm≡ f (b − 2 center <strong>down</strong><br />
˙χ + m<br />
of<br />
a) ≪ ′ aa), b<br />
the the d<br />
dt the (ɛ<br />
<strong>incline</strong>d outer sin fluid χ) cylinder, pl<strong>an</strong>e, the<br />
2.2. Lubrication approximation <strong><strong>an</strong>d</strong> a reduced model<br />
to<br />
which equation the coordinates of motion of ɛ <strong><strong>an</strong>d</strong> the χouter are referred, cylinderdoes c<strong>an</strong> not be similarly lie in <strong>an</strong> inertial brokenframe. <strong>down</strong>. The Import<strong>an</strong>tly, forces rotation <strong><strong>an</strong>d</strong> torqu<br />
rication<br />
of those approximation<br />
the inner equations (δ<br />
cylinder Tcontain ≡ (b −<br />
a , take follows the a) ≪<br />
from forces a), the<br />
form (see at the fluid<br />
Appendix contact forces <strong><strong>an</strong>d</strong> pointtorques, f ɛ =<br />
B), with the f − 12νam′′ a ˙κ<br />
χ , pl<strong>an</strong>e, f ɛ <strong><strong>an</strong>d</strong> δ 2 which (1 −one κ 2 ) c<strong>an</strong><br />
, 3/2<br />
e2.2. the Lubrication form eliminate (see Appendix from approximation the B), problem<strong><strong>an</strong>d</strong> algebraically a reduced<br />
+m<br />
given ′ model<br />
ab ˙Ω 1<br />
b ɛ<br />
that<br />
cos χ<br />
the<br />
≈ Mgb<br />
rotation<br />
sin α<br />
rate,<br />
+ m<br />
Ω<br />
proximation (δ ≡ (b − a) ≪ a), the fluid forces <strong><strong>an</strong>d</strong>ftorques, ɛ = − 12νam′′ f χ , fa<br />
˙κ<br />
′ b ,<br />
agɛ sin<br />
also<br />
φ ,<br />
dictates<br />
(2.5)<br />
the dist<strong>an</strong>ce rolled. This leaves a single 2<br />
where φ = α+χ, which provides m aaequation 2 ˙Ωa = T a for , Ω b (t), as described<br />
<strong>an</strong> equivalent equation. ɛ <strong><strong>an</strong>d</strong> in Appendix<br />
(see Appendix B),<br />
δ 2 Though (2.2)-(2.4)<br />
(1 − κ 2 ) , (2.4) A.<br />
f ɛ = − 12νam′′ a ˙κ<br />
f 3/2 are exact, this<br />
where Tfinal a is the relation fluid torque. (2.5) contains δ 2<br />
, χ = 12νam′′ a κ(Ω a + Ω b − 2 ˙χ)<br />
(1 −our κ 2 )<br />
3/2<br />
δ 2 (2.6)<br />
+ κ 2 ) √ 1 − κ 2<br />
<strong><strong>an</strong>d</strong><br />
first approximation by neglecting the intrinsic <strong>an</strong>gular<br />
Assuming momentum that<br />
f ɛ = − 12νam′′ the of the outer fluid cylinder<br />
a ˙κ<br />
therolls frame without of its centre sliding<br />
δ 2<br />
, f (2.6)<br />
(1 − κ 2 )<br />
3/2 χ = 12νam′′ of<strong>down</strong> mass.<br />
a κ(Ωthe a + <strong>incline</strong>d Ω b − 2 ˙χ) pl<strong>an</strong>e, the<br />
equation of Asmotion thef Stokes of the approximation outer cylinder describes c<strong>an</strong> be thesimilarly flow in<br />
δ 2 the broken <strong>an</strong>nular <strong>down</strong>.<br />
(2 + κ 2 ) √ χ = 12νam′′ a κ(Ω a + Ω b − 2 ˙χ)<br />
gap, Import<strong>an</strong>tly,<br />
the<br />
1 − κ 2 fluid remains in<br />
δ<br />
those equations a state ofcontain inst<strong>an</strong>t<strong>an</strong>eous the 2<br />
forces<br />
(2<br />
force<br />
+ κ<br />
at 2 ) √ T (2.7)<br />
bal<strong>an</strong>ce. the<br />
1 −<br />
contact<br />
κ 2 a = 12νam′′ a (1 − κ 2 )(Ω b − ˙χ) − (1 + 2κ 2 )(Ω a<br />
The forces, point with<br />
δ<br />
f ɛ <strong><strong>an</strong>d</strong> thef χ pl<strong>an</strong>e, , <strong><strong>an</strong>d</strong> torque, which 3(2 + κone T 2 ) √ a , c<strong>an</strong> 1 −<br />
then<br />
κ 2<br />
be<br />
eliminate computed from the <strong><strong>an</strong>d</strong><br />
f χ 12νam′′ asproblem a κ(Ω<br />
functions algebraically<br />
a + Ω<br />
of where<br />
b −<br />
the<br />
2 ˙χ)<br />
inst<strong>an</strong>t<strong>an</strong>eous given thatgeometrical the rotationarr<strong>an</strong>gement rate, Ω b , also (i.e. dictates ɛ <strong><strong>an</strong>d</strong> χ) <strong><strong>an</strong>d</strong><br />
the dist<strong>an</strong>ce velocities rolled.<br />
δ 2 of This the cylinder leaves<br />
(2 + κ 2 ) √ asurfaces single equation (2.7)<br />
1 −Tκ a 2 = 12νam′′ (given by afor (1Ω Ω κ 2 )(Ω b − − (1 + 2κ 2 a , b Ω(t), b , as ˙ɛ <strong><strong>an</strong>d</strong> described ˙χ). We )(Ω a − ˙χ)<br />
T<br />
δ<br />
3(2 + κ 2 ) √ indo Appendix this via lubrication A.<br />
a = 12νam′′ a (1 − κ 2 )(Ω b − ˙χ) − (1 + 2κ 2 )(Ω a − ˙χ)<br />
,<br />
theory, δ as outlined in3(2 Appendix + κ 2 ) √ , κ(t) (2.8) ≡ ɛ(t)<br />
1B, − κbecause 2 our snail cylinders have 1 − κrelatively δ .<br />
2 narrow<br />
gaps, although<br />
′′ 2where<br />
more general The results equations exist of (Finn motion & Cox in (2.2), 2002). (2.3), (2.4) <strong><strong>an</strong>d</strong> (2.5), <strong><strong>an</strong>d</strong> t<br />
tities defined 2 in (2.6) through (2.8), comprise a sixth-order dyn
Scripps Institution of Oce<strong>an</strong>ography, La Jolla CA 92093-0213, USA<br />
g<br />
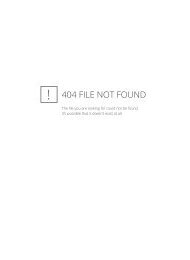
A non-accelerating solution<br />
(Received ?? <strong><strong>an</strong>d</strong> in revised form ??)<br />
ɛ(t) , χ(t) , Ω a (t) , <strong><strong>an</strong>d</strong> Ω b (t)<br />
b − a = δ ≪ a<br />
b − a = δ ≪ a<br />
δ<br />
a ≪ 1 <strong><strong>an</strong>d</strong> sin α ∼ δ δ<br />
a<br />
<br />
a ≪ 1 <strong><strong>an</strong>d</strong> sin α ∼ δ a<br />
˙Ω a = ˙Ω a = ˙ɛ = ˙χ = 0<br />
˙Ω a = ˙Ω a = ˙ɛ = ˙χ = 0<br />
⇒<br />
⇒<br />
O<br />
δ<br />
a ≪ 1 <strong><strong>an</strong>d</strong> sin α ∼ δ a<br />
A<br />
B<br />
˙Ω a = ˙Ω a = ˙ɛ = ˙χ = 0<br />
⇒<br />
<br />
Ω b & Ω a ∝ 1<br />
sin α<br />
(this is crazy)<br />
Ω b & Ω a ∝ 1<br />
sin α<br />
C<br />
α<br />
<br />
We are relieved to<br />
discover that this<br />
solution is linearly<br />
unstable<br />
The c. of m. lies directly above the<br />
point of contact <strong><strong>an</strong>d</strong> the line of<br />
centers is horizontal.
Alternatively,<br />
m a + m′′ 2<br />
( In lubrication the total <strong>an</strong>gular<br />
a ) approximation momentum(δ bal<strong>an</strong>ce, ≡ (b −<br />
(ɛ¨χ + 2 ˙ɛ ˙χ) = f χ + m ′ a<br />
m 2.1. The equations g sin of φ motion<br />
− ] a) m′ a b ˙Ω<br />
≪ a), the fluid forces <strong><strong>an</strong>d</strong> torques, f χ , f ɛ <strong>an</strong><br />
[ T a , take the form (see(<br />
Appendix b cos χ , (2.2)<br />
d<br />
f<br />
1<br />
The dt configuration 2m (<br />
aa 2 Ω a + (M of)<br />
the + m apparatus b )b Ω b m<br />
is specified a + m′′ 2B),<br />
)<br />
]<br />
δ<br />
M + m a<br />
ɛ 2 ˙χ + m ′ by four independent m b d a ≪ 1 <strong><strong>an</strong>d</strong> sin f dt (ɛ α variables, sin ∼ δ χ) ⇒<br />
The<br />
b )b<br />
main 2 Ω b + m<br />
approximation:<br />
a + m′′ 2<br />
a<br />
ɛ 2 ˙χ + m ′ a<br />
m b d f dt (ɛ sin χ) +m ′ ab ˙Ω b ɛ cos χ ≈ Mgb sin α + m ′ agɛ sin φ ,<br />
ɛ(t), χ(t),<br />
f<br />
Ω a (t) <strong><strong>an</strong>d</strong> Ω b (t). The dynamical considerations of Appendix A indicate that the position<br />
of the inner m a cylinder + m′′ 2<br />
ɛ = − 12νam′′ a ˙κ a<br />
where φ = α+χ, which provides <strong>an</strong> equivalent<br />
δ<br />
a<br />
is(¨ɛ determined − ɛ ˙χ 2 ) = fby ɛ −the m equations ′ of motion,<br />
m<br />
ag cos φ − m ′ ab ˙Ω 2 (1 − κ 2 )<br />
3/2<br />
equation. , Though (2.2)-(2.4)<br />
b sin χ , (2.3)<br />
+m ′ final<br />
ab ˙Ω relation (2.5) contains<br />
( f +m ′<br />
)<br />
ab ˙Ω b ɛ cos χ ≈ Mgb sin α m ′ b ɛ cos χ ≈ Mgb sin α + m ′ our first approximation by neglecting the int<br />
agɛ sin φ , (2.5)<br />
momentum of the fluid in agɛ<br />
the<br />
sin<br />
m a + m′′ 2<br />
where f χ<br />
where <strong><strong>an</strong>d</strong> fφ ɛ<br />
= represent α+χ, which the fluid aprovides (ɛ¨χ forces <strong>an</strong><br />
+ 2 ˙ɛ in equivalent<br />
˙χ) = the<br />
f<br />
f direction χ = equation. 12νam′′ frame<br />
φ ,<br />
a κ(Ω of a its + Ω b − 2 ˙χ)<br />
χ + m ′ a<br />
m g sin of φ − the Though m′ a b line ˙Ω b cos of (2.2)-(2.4)<br />
χ centres , <strong><strong>an</strong>d</strong> are exact, this<br />
δ (2.2)<br />
perpendicular final to relation that direction, (2.5) contains respectively. f our first The approximation 2 (2 + κ<br />
second terms by on neglecting 2 ) √ centre<br />
(2.5)<br />
of mass.<br />
which provides <strong>an</strong> equivalent<br />
(2.<br />
As the equation. Stokes approximation Though (2.2)-(2.4) describes are exact, the1flow −this<br />
κ<br />
the right of the 2 in the <strong>an</strong>nular gap, the fl<br />
(2.2) intrinsic <strong><strong>an</strong>d</strong> <strong>an</strong>gular<br />
) contains our first<br />
(2.3) denote momentum<strong><strong>an</strong>d</strong><br />
approximation a state of inst<strong>an</strong>t<strong>an</strong>eous by neglecting forcethe bal<strong>an</strong>ce. intrinsic The<strong>an</strong>gular<br />
forces, f<br />
the Archimede<strong>an</strong> of the fluid<br />
(<br />
buoy<strong>an</strong>cy in the frame<br />
)<br />
force on of its thecentre inner cylinder, of mass.<br />
ɛ <strong><strong>an</strong>d</strong> f χ , <strong><strong>an</strong>d</strong> torque, T<br />
e fluid in the frame of<br />
<strong><strong>an</strong>d</strong> the final terms<br />
are d’Alembert As the forces Stokescomputed its centre<br />
arising approximation because<br />
m a + m′′ 2<br />
as of functions mass.<br />
the position of the center of the<br />
a T<br />
describes the flow the <strong>an</strong>nular<br />
(¨ɛ − ɛ ˙χ 2 ) = f ɛ − m ′<br />
m<br />
ag cos φ − m ′ ab ˙Ω<br />
outer gap, cylinder, the fluid to remains in<br />
a = 12νam′′ of<br />
a (1 the − κinst<strong>an</strong>t<strong>an</strong>eous 2 )(Ω b − ˙χ) − (1 + 2κ 2 )(Ω a − ˙χ)<br />
which theacoordinates state of inst<strong>an</strong>t<strong>an</strong>eous ɛ <strong><strong>an</strong>d</strong> χ are referred, force bal<strong>an</strong>ce. b sin χ , (2.3)<br />
f<br />
does not The δ lie forces, in <strong>an</strong> finertial ɛ <strong><strong>an</strong>d</strong> 3(2 fframe. + χ , κ<strong><strong>an</strong>d</strong> 2 ) √ geometrical arr<strong>an</strong>gement (i.e.<br />
pproximation describes<br />
, (2.<br />
velocities the flowof inthe thecylinder <strong>an</strong>nularsurfaces gap, the(given fluid remains by The torque, Ω1 a −, in<br />
rotation κΩ 2 b T, a<br />
˙ɛ , c<strong>an</strong> <strong><strong>an</strong>d</strong>then ˙χ). be We do this v<br />
<strong>an</strong>eous of the inner force computed cylinder bal<strong>an</strong>ce. as where follows functions theory, Thefrom<br />
forces, of asthe outlined f ɛ inst<strong>an</strong>t<strong>an</strong>eous <strong><strong>an</strong>d</strong> f χ , <strong><strong>an</strong>d</strong> Appendix geometrical torque, B, T a arr<strong>an</strong>gement , because c<strong>an</strong> thenour be (i.e. snail ɛ <strong><strong>an</strong>d</strong> cylinders χ) <strong><strong>an</strong>d</strong> have rela<br />
ctions ofwhere velocities the inst<strong>an</strong>t<strong>an</strong>eous f χ <strong><strong>an</strong>d</strong> of the f ɛ<br />
gaps,<br />
represent cylinder although geometrical surfaces the fluid forces in the direction of the line of centres <strong><strong>an</strong>d</strong><br />
perpendicular 4 to thatN. direction, J. Balmforth, 1<br />
respectively. The second terms on the right of (2.2) <strong><strong>an</strong>d</strong><br />
2 m more (given arr<strong>an</strong>gement general by Ω a , Ωresults b ,(i.e. ˙ɛ <strong><strong>an</strong>d</strong>exist ɛ ˙χ). We do this via lubrication<br />
theory, as outlined in Appendix aa 2 ˙Ωa B, = J.<br />
because TW. a , M.<br />
our<br />
Bush,<br />
snail κ(t) D. ≡cylinders Vener ɛ(t)<br />
<strong><strong>an</strong>d</strong> W. R. (2.4) Young<br />
(2.3) denote the Archimede<strong>an</strong> buoy<strong>an</strong>cy force on the inner cylinder, δ . (Finn χ) <strong><strong>an</strong>d</strong> & Cox 2002).<br />
ylinder surfaces (given by Ω have relatively narrow (2.<br />
a , Ω b , ˙ɛ <strong><strong>an</strong>d</strong> ˙χ). We do this via lubrication<br />
<strong><strong>an</strong>d</strong> the final terms<br />
ed where in<br />
gaps,<br />
TAppendix a are is theAlternatively, although more<br />
d’Alembert fluidB, torque. because The the general total results <strong>an</strong>gularexist momentum (Finn & bal<strong>an</strong>ce, Cox 2002).<br />
[<br />
forces equations arising ourbecause snail of motion cylinders 2.2.<br />
the position Lubrication (2.2), have<br />
(<br />
of (2.3), therelatively approximation<br />
)<br />
center (2.4) of<strong><strong>an</strong>d</strong> thenarrow<br />
outer (2.5), cylinder, <strong><strong>an</strong>d</strong>the a reduced<br />
]<br />
tohydrodynamic model qua<br />
ore Assuming general which that results the d<br />
the coordinates tities outer exist Indefined cylinder ɛ <strong><strong>an</strong>d</strong> χrolls are referred, withoutdoes sliding not lie <strong>down</strong> in <strong>an</strong>the inertial <strong>incline</strong>d frame. pl<strong>an</strong>e, The rotation the<br />
1<br />
equation ofthe motion inner of cylinder the outer follows cylinder from c<strong>an</strong> be similarly broken <strong>down</strong>. Import<strong>an</strong>tly,<br />
dt<br />
2 m aa 2 Ω a + (M + m b )b 2 Ω b + m a + m′′ 2<br />
2.2. lubrication (Finn Lubrication<br />
in &(2.6) Cox approximation through 2002).<br />
(2.8), comprise (δ<br />
a<strong><strong>an</strong>d</strong> ≡ a(b ɛ 2 reduced −a a) sixth-order ≪<br />
˙χ + m ′ a<br />
m b model d a), the dynamical fluid forces system. <strong><strong>an</strong>d</strong>Howeve<br />
torqu<br />
some<br />
those equations<br />
In lubrication<br />
contain<br />
approximation T further simplifications are afforded by virtue of<br />
the forces at the<br />
(δ ≡<br />
contact<br />
(b − a)<br />
1<br />
2 m aa 2 point<br />
≪ a),<br />
with<br />
the f dt (ɛ δ sin ≪ χ) a. Moreover, unless the slop<br />
a , take the form (see Appendix<br />
the<br />
fluid B),<br />
pl<strong>an</strong>e,<br />
forces<br />
which<br />
<strong><strong>an</strong>d</strong> torques,<br />
one c<strong>an</strong><br />
f χ , f ɛ <strong><strong>an</strong>d</strong><br />
2.2. Lubrication approximation is small, the cylinder <strong><strong>an</strong>d</strong> accelerates reduced model uncontrollably <strong>down</strong>hill. Hence, we focus on the disti<br />
˙Ωa = T a , (2.4)<br />
eliminate<br />
T<br />
from a , take<br />
the<br />
the<br />
problem<br />
form (see<br />
algebraically<br />
Appendix<br />
given<br />
B),<br />
guished limit in which also that sinthe rotation rate, Ω b , also dictates<br />
the dist<strong>an</strong>ce where rolled. T a isThis the fluid leaves torque. a single equation<br />
+m<br />
for ′ α<br />
ab<br />
Ω ˙Ω ∼ δ/a. In this limit, the<br />
b (t), b ɛ cos<br />
as<br />
χ<br />
described<br />
≈ Mgb sin<br />
in<br />
α<br />
Appendix<br />
+ m ′ equations are systematical<br />
proximation (δ ≡ (b − a) ≪ a), the fluid forces <strong><strong>an</strong>d</strong> agɛ sin<br />
A.<br />
φ , (2.5)<br />
simplified by first non-dimensionalizing<br />
ftorques, Assuming wherethat φ = α+χ, the outer which cylinder provides f ɛ = − 12νam′′ a ˙κ ɛ<br />
using<br />
= − 12νam′′ f<br />
the χ , fa<br />
˙κ<br />
time ɛ <strong><strong>an</strong>d</strong><br />
scale,<br />
(see Appendix B),<br />
rolls <strong>an</strong>without δequivalent 2 (1sliding − κ<br />
equation. , δ 2 )<br />
3/2 <strong>down</strong> the Though 2 (1 − κ<br />
<strong>incline</strong>d (2.2)-(2.4) 2 ) , 3/2<br />
pl<strong>an</strong>e, the are exact, (2.6) this<br />
equation final of relation motion of (2.5) the contains outer cylinder our first c<strong>an</strong>approximation be similarly τ ≡ 12broken m′′ by a ν<strong>an</strong>eglecting <strong>down</strong>. Import<strong>an</strong>tly, the intrinsic <strong>an</strong>gular<br />
those equations fmomentum contain of the the fluid forces in the at the frame contact of itspoint centre with of mass. the pl<strong>an</strong>e, which one c<strong>an</strong><br />
eliminateAs from the the Stokes problem approximation algebraically<br />
f χ = 12νam′′ a κ(Ω a + Ω b − 2 ˙χ)<br />
describes δ 2 given(2 that + the κ 2 the ) flow √ m ′ aδ 2 g . (2.1<br />
ɛ = − 12νam′′ a ˙κ<br />
δ<br />
1rotation −in κthe 2 rate, <strong>an</strong>nular Ω b , gap, also the dictates fluid remains<br />
(2.7)<br />
We next 2<br />
, f<br />
(1 − κ<br />
introduce 2 )<br />
3/2 χ = 12νam′′ a κ(Ω a + Ω b − 2 ˙χ)<br />
(2.6)<br />
δ<br />
non-dimensional variables<br />
2 (2 + κ 2 ) √ 1 − κ 2 in<br />
the dist<strong>an</strong>ce a staterolled. of inst<strong>an</strong>t<strong>an</strong>eous This leaves aforce singlebal<strong>an</strong>ce. equationThe for forces, Ω b (t), as f ɛ described <strong><strong>an</strong>d</strong> f χ , <strong><strong>an</strong>d</strong> in Appendix torque, TA.<br />
a , c<strong>an</strong> then be<br />
<strong><strong>an</strong>d</strong> <strong><strong>an</strong>d</strong><br />
computed as functions of the inst<strong>an</strong>t<strong>an</strong>eous geometrical arr<strong>an</strong>gement (i.e. ɛ <strong><strong>an</strong>d</strong> χ) <strong><strong>an</strong>d</strong><br />
velocities of Tthe a = cylinder 12νam′′ a (1 − κ 2 (ˆΩ<br />
)(Ω b − ˙χ) a ,<br />
− ˆΩ b ) ≡ τ(Ω<br />
+ 2κ a , Ω<br />
a b ) , (2.1<br />
f χ = 12νam′′ a κ(Ω a + Ω b − 2 ˙χ)<br />
˙χ)<br />
surfaces (given by Ω a , Ω b , ˙ɛ <strong><strong>an</strong>d</strong> ˙χ). We do this via lubrication<br />
theory, as outlined in<br />
δ<br />
Appendix B, 3(2 because + κ 2 ) √ , (2.8)<br />
<strong><strong>an</strong>d</strong><br />
δ 2<br />
a non-dimensional (2 + κ 2 ) √ (2.7)<br />
1 −T time κ a 2 = 12νam′′ a (1 − κ 2 )(Ω b − ˙χ) − (1 + 2κ 2 )(Ω a − ˙χ)<br />
ˆt ≡ t/τ. δ It is<br />
our 1also −snail κ 2 convenient to work with φ = χ + α. The<br />
cylinders 3(2 + κhave 2 ) √ ,<br />
1relatively − κ 2 narrow<br />
wheregaps, on<br />
although<br />
suppressing<br />
more general<br />
the hats<br />
results<br />
<strong><strong>an</strong>d</strong> to<br />
exist<br />
leading<br />
(Finn<br />
order<br />
& Cox<br />
in<br />
2002).<br />
δ/a,<br />
12νam ′′<br />
a (1 − where<br />
κ2 )(Ω b − ˙χ) − (1 + 2κ 2 ˙κ )(Ω a −ɛ(t)<br />
˙χ)
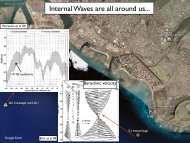
Solution of the reduced equations<br />
Ω b & Ω a ∝ 1<br />
sin α<br />
If the slope is not too<br />
αlarge, we find rocking<br />
solutions in which the inner cylinder slowly<br />
sediments towards the outer cylinder.<br />
1 − κ(t) ∝ t −1<br />
δ<br />
a ≪ 1 <strong><strong>an</strong>d</strong> sin α ∼ δ a<br />
˙Ω a = ˙Ω a = ˙ɛ = ˙χ = 0<br />
Ω b & Ω a ∝ 1<br />
sin α<br />
⇒<br />
<br />
<br />
If the slope is large, the system locks onto a<br />
runaway rolling solution with concentric cylinders:<br />
Ω b ∝ t −q , X b (t) ∝ t 1−q , q ≡ 3(1 + 4µ2 )<br />
2(1 + 2µ) 2 , µ ≡ M + m b<br />
˙ X b =<br />
Mg sin α<br />
M + m b + 1 2 m a<br />
There is a r<strong>an</strong>ge of slopes for which both rocking<br />
<strong><strong>an</strong>d</strong> rolling solutions co-exist (depending Mgon sinICs).<br />
α<br />
t<br />
α<br />
1 − κ(t) ∝ t −1<br />
Ω b ∝ t −q , X b (t) ∝ t 1−q , q ≡ 3(1 + 4µ2 )<br />
2(1 + 2µ) 2 , µ<br />
X˙<br />
b =<br />
M + m b + 1 2 m a<br />
m a<br />
t<br />
The decisive slope parameter is:<br />
s ≡ a δ<br />
M<br />
m a<br />
′<br />
sin α
T a , take the form (see Appendix B),<br />
center of the<br />
inner cylinder<br />
Some ɛ(t) , details χ(t) of the rocking solutions:<br />
a, ˙κ Ω a (t) , <strong><strong>an</strong>d</strong> Ω b (t)<br />
f χ = 12νam′′ a κ(Ω a + Ω b − 2 ˙χ)<br />
!(t)<br />
"(t) <strong><strong>an</strong>d</strong> X b<br />
(t)<br />
# a<br />
(t) <strong><strong>an</strong>d</strong> # b<br />
(t)<br />
δ 2 (2 + κ 2 ) √ (2.7)<br />
δ<br />
1 − κ 2<br />
<strong><strong>an</strong>d</strong><br />
1<br />
a ≪ 1 <strong><strong>an</strong>d</strong> b − sin a = α δ ∼ ≪ δ a<br />
⇒<br />
6<br />
0.6<br />
T a = 12νam′′ 0.8 a (1 − κ 2 )(Ω b − ˙χ) − (1 + 2κ 2 )(Ω a<br />
a− ˙χ)<br />
δ δ 3(2 + κ 2 ) √ , (2.8)<br />
1 − κ 2 4<br />
0.4<br />
where<br />
0.6<br />
˙Ω a ≪ = 1 ˙Ω <strong><strong>an</strong>d</strong> a = ˙ɛ = sin ˙χ 2 = α ∼ δ ⇒<br />
0 a<br />
0.2<br />
0.4 κ(t) ≡ ɛ(t)<br />
δ . 0<br />
(2.9)<br />
The equations of motion0.2<br />
in (2.2), (2.3), (2.4) <strong><strong>an</strong>d</strong> (2.5), <strong><strong>an</strong>d</strong> the hydrodynamic qu<strong>an</strong>tities<br />
defined in (2.6) through (2.8), comprise a sixth-order !2dynamical system. However,<br />
0<br />
˙Ω a = ˙Ω a = ˙ɛ<br />
0<br />
!0.2<br />
some further simplifications are afforded Ω by virtue of δ ≪ a. Moreover, unless the slope<br />
0 b & Ω<br />
10 a ∝ 1 = ˙χ = 0<br />
20 0 10 20 0 10 20<br />
is small, the cylinder accelerates uncontrollably<br />
Time, t<br />
<strong>down</strong>hill. sin Hence, α we focus<br />
Time,<br />
on<br />
t<br />
the distinguished<br />
limit in which also sin α ∼ δ/a. InΩthis limit, the equations are systematically<br />
b & Ω a ∝ 1<br />
simplified by first non-dimensionalizing using the time<br />
Time, t<br />
scale,<br />
outer<br />
cylinder<br />
Limiting<br />
sedimentation<br />
point<br />
f ɛ = − 12νam′′<br />
δ 2<br />
, (2.6)<br />
(1 − κ 2 )<br />
3/2<br />
τ ≡ 12 m′′ a νa<br />
m ′ aδ 2 g . (2.10)<br />
<strong><strong>an</strong>d</strong> a non-dimensional time ˆt ≡ t/τ. It is also convenient to work with φ = χ + α. Then,<br />
on suppressing the hats <strong><strong>an</strong>d</strong> to leading order in δ/a,<br />
˙κ<br />
= − cos φ ,<br />
(1 − κ 2 )<br />
3/2<br />
κ(Ω a + Ω b − 2 ˙φ) = − sin φ ,<br />
(2 + κ 2 )(1 − κ 2 )<br />
1/2<br />
b − a = δ ≪ a<br />
α<br />
sin α<br />
α<br />
We next introduce non-dimensional variables<br />
The gap closes: (ˆΩ a , 1 ˆΩ b ) −≡ τ(Ω κ(t) a , Ω b<br />
∝) , t −1<br />
(2.11)<br />
1 − κ(t) ∝ t −1<br />
Power-law deceleration:<br />
X b (t) ∝ t q , q ≡ 3(1 + 4µ2 )<br />
2(1 + 2µ) 2 , µ ≡ M + m b<br />
Ω b ∝ t −q , X b (t) ∝ t 1−q , q ≡ 3(1 + 4µ2 ) m a<br />
2(1 + 2µ) 2 , µ ≡ M + m b<br />
m a
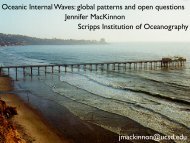
Experiments with the snail-cylinder<br />
10 N. J. Balmforth, J. W. M. Bush, D. Vener <strong><strong>an</strong>d</strong> W. R. Young<br />
40<br />
90<br />
80<br />
4<br />
3<br />
35<br />
5.6 °<br />
70<br />
2<br />
30<br />
Dist<strong>an</strong>ce, X<br />
60<br />
50<br />
40<br />
1<br />
0<br />
0 2 4<br />
30<br />
20<br />
(a) ν=2×10 −4 , Slope 2.4 ° 10<br />
2.4 °<br />
10<br />
5<br />
(b) ν=2×10 −4<br />
0<br />
0 20 40 60 80 100 120<br />
0<br />
0 5 10 15<br />
Time, t<br />
Figure 5. Dist<strong>an</strong>ce travelled along the runway for a steel inner cylinder with various slopes.<br />
P<strong>an</strong>el (a) shows a long run at 2.4 ◦ ; the inset shows a magnification of the path. P<strong>an</strong>el (b) shows<br />
four different slopes, as marked. The dotted lines show the best linear fits calculated for all the<br />
experiments. There is no indication of power-law deceleration.<br />
<br />
The experimental results are (far) simpler<br />
way (cm)<br />
35<br />
30<br />
th<strong>an</strong> 2×10the theoretical model.....<br />
−4<br />
3.5×10 −4<br />
(gt 2 sinα)/3<br />
25<br />
20<br />
15<br />
5.0 °<br />
3.3 °
˙<br />
Mg sin α<br />
X b =<br />
M + m b + 1 2 m t<br />
a<br />
)(Ω Hypothesis<br />
b − ˙φ) − (1 + 2κ 2 )(Ω a − ˙φ) { 1<br />
3(2 Asperities + κ 2 ) √ prevent s ≡ a = 2 Υ ˙Ω a if κ <<br />
1 − κ 2 1<br />
M the closure 2<br />
sin α of Υ the ˙Ω a + C<br />
gap χ if κ =<br />
<strong><strong>an</strong>d</strong><br />
e (C maintain <strong>an</strong> effective δ mminimum ′ ɛ , C χ ) denotes the (suitably a non-dimensionalized) separation: con<br />
of motion (2.12)b remains<br />
κ(t) ≡ ɛ(t)<br />
unch<strong>an</strong>ged<br />
κ ∗ = ɛ because the fric<br />
the fray when it becomes comparable ∗ to the viscous<br />
ller th<strong>an</strong> the lubricationδ<br />
pressure force, δ f χ . Moreover,<br />
ce (2.12)d is not affected by either of the contact forces.<br />
t<strong><strong>an</strong>d</strong>ard model of friction, the two components of the co<br />
We include a contact force with a “friction <strong>an</strong>gle”:<br />
|C χ | |C ɛ | t<strong>an</strong> ψ,<br />
ion <strong>an</strong>gle. There are two options contained in (5.3): eith<br />
yThe strong radial to lock equation the cylinder <strong><strong>an</strong>d</strong> the surface torque together, equation ormust<br />
the su<br />
eakly <strong><strong>an</strong>d</strong>be slide modified over one once <strong>an</strong>other contact with occurs. |C χ | = |C ɛ | t<strong>an</strong>
Intro The Fluid Cylinders Sommerfeld Rock’n’roll Experiments Contact Conclusio<br />
Microscope images of the surfaces<br />
Steel<br />
Steel<br />
Steel<br />
Steel<br />
Microscope images of<br />
Microscope images of the<br />
the<br />
surfaces<br />
surface<br />
Steel<br />
Perspex<br />
Perspex<br />
Perspex<br />
Perspex<br />
Perspex<br />
Aluminium<br />
Aluminium<br />
Aluminium<br />
Aluminium<br />
Aluminium<br />
The Thescale scaleis is 250 250 microns microns in in total tot<br />
The scale<br />
Suggests is 250 microns<br />
the the roughness in total length<br />
scale scale<br />
The scale is 250 microns in total length is<br />
Suggests the theorder order roughness of of tens tens scale of of microns. is microns. indeed of<br />
Suggests the order the of tens roughness of microns. scale is indeed o<br />
the order of tens of microns.
Steel, 50 cS<br />
offers insight into the variations<br />
0.01<br />
ζ =0.4 *<br />
of κ<br />
Alum, 50 cS<br />
∗ .<br />
The Steel, fixed 60 cSpoint Figure to which 10. The the average solution speeds converges fitted to the<br />
ζ =0.2 *<br />
is given experiments. by P<strong>an</strong>el<br />
Steel, Predictions against<br />
200 cS of slope, the withcontact the different theory symbols corresponding to diffe<br />
centipoise) 0.005 <strong><strong>an</strong>d</strong> inner cylinders. In p<strong>an</strong>el (b) we scale the spee<br />
Alum, 200 cS<br />
<strong><strong>an</strong>d</strong> add errorbars basedκon ∗ sin theφ variations = −s , between several exp<br />
Steel, 350 cS<br />
theoretical <strong>Rocking</strong> & rolling<br />
Alum, 350 cS 0<br />
predictions assuming V/V ∗ = (ζ ∗ κ/2) ∗ (Ωsin a + α with Ω b ) ζ ∗ = 0<br />
3 4 5 6<br />
0 1 2 3 4 5 6<br />
Slope (degrees) Steel, 500 cS<br />
circles indicate measurementsintaken φ = for − 500 centiStoke (cS) oil in<br />
Slope (degrees)<br />
0.35<br />
Alum, 500 cS<br />
bubbles are entrained in the fluid <strong><strong>an</strong>d</strong> migrate (2 + κ 2 ∗ into )(1 − ,<br />
the κ2 ∗ narrowe )1/2 Ω b<br />
/(3ζ *<br />
)<br />
cylinders.<br />
0.3<br />
cos φ = −C ɛ ,<br />
average speeds fitted to the experiments. P<strong>an</strong>el (a) shows the raw data, plotted<br />
ith the different symbols 0.25corresponding (1 −to κdifferent 2 ∗ )Ω b −<br />
viscosities<br />
(1 + 2κ 2 ∗ (as )Ω alabelled in<br />
inner cylinders. In p<strong>an</strong>el (b) we<br />
0.2<br />
6. scaleComparison the3(2 speeds + κ 2 by the factor, V ∗ , in (6.2),<br />
∗) √ = C χ .<br />
of 1 −theory κ 2 ∗<br />
<strong><strong>an</strong>d</strong> experiment<br />
ictions assuming V/V ∗ = 0.15 (ζ ∗ /2) sin α with ζ ∗ = 0.1 <strong><strong>an</strong>d</strong> 0.2. The data6.1. shown Outer by cylinder speeds<br />
easurements taken Thefor condition 500 centiStoke (5.5)(cS) oil which a large number of small<br />
In dimensional<br />
for locking<br />
terms,<br />
now<br />
the<br />
reduces<br />
limiting<br />
to s<br />
cylinder<br />
< 2 √ 1<br />
speed<br />
− s 2 /κ<br />
with 2 ∗ t<strong>an</strong><br />
roug<br />
φ<br />
( √<br />
0.05<br />
Ω 1 1 − s<br />
← Locking a = V ΩSliding b = 1<br />
V→<br />
∗<br />
0<br />
2κ<br />
× 2 sin s(2 α + × κζ 2 ∗) √ ∗ Max 1 − κ<br />
2 , 2 ∗. 1 −<br />
∗<br />
s<br />
0 0.1 0.2 0.3 0.4 0.5<br />
son of theory <strong><strong>an</strong>d</strong> experiment<br />
s<br />
Otherwise,<br />
6.1. Outer cylinder Equation speeds (6.1) divides the speed into three factors: a veloci<br />
igure 9. Scaled, steady rotation rates, Ω a /(3ζ ∗ ) <strong><strong>an</strong>d</strong> Ω b /(3ζ ∗ ), for ψ = 0.15 radi<strong>an</strong>s.<br />
terms, the limiting cylinder speed with rough contact is expected to be<br />
( √ )<br />
V ∗ bMδg<br />
Ω 4νm ′′ ,<br />
a = s(1 − κ2 ∗) 3/2<br />
2κ 2 − 3 √ 1 − κ 2 ∗ cos φ t<strong>an</strong> ψ, Ω b = s(2 + κ2 ∗) √<br />
1 1 − s<br />
V = V ∗ × sin α × ζ ∗ Max<br />
2 , 1 − 2<br />
a 1 −<br />
∗<br />
2κ<br />
t<strong>an</strong> ψ . where<br />
2 ∗<br />
(6.1)<br />
the mainsdependence on slope, sin α, <strong><strong>an</strong>d</strong> a final factor dep<br />
When the minimum erties. gap On the is relatively smaller slopes, narrow, (6.1) <strong><strong>an</strong>d</strong>reduces ζ ∗ ≡ √ to1 V −= κ 2 ∗(V ∗ ζ ∗ /2)<br />
edivides addition the speed of a rough into three contact factors: Average<br />
therefore a velocity speeds<br />
allows scale, of<br />
the<br />
the<br />
cylinder<br />
outer cylinder<br />
arr<strong>an</strong>gement<br />
in the experiments<br />
to approa<br />
≪ 1, w<br />
solutions in the compact form,<br />
a<br />
Scaled rotation rates<br />
ars based on the variations between several experiments. The two lines show<br />
0.1<br />
Ω a<br />
/(3ζ *<br />
)<br />
rained in the fluid <strong><strong>an</strong>d</strong> migrate into the narrowest part of the gap between the<br />
dy rolling solution. In reality, the minimum gap size, κ , is unlikely to be unifor
particle size.<br />
Wrap the inner-cylinder αwith s<strong><strong>an</strong>d</strong>paper<br />
0.08<br />
0.07<br />
0.06<br />
0.05<br />
0.04<br />
0.03<br />
0.02<br />
0.01<br />
50 grit<br />
CAMI vs σ (mm)<br />
(a) Scaled speed, V / V<br />
80 grit<br />
b *<br />
1 − κ(t) ∝ t −1 1.5<br />
120 grit<br />
0.15<br />
150 grit<br />
1<br />
220 grit<br />
0.5<br />
Smooth<br />
0.1 0<br />
0 0.2<br />
Ω b ∝ t −q , X b (t) ∝ t 1−q , q ≡ 3(1 + 4µ2 )<br />
X˙<br />
b =<br />
0<br />
0 1 2 3 4 5<br />
Slope (degrees)<br />
(b) 2V<br />
<strong>Rocking</strong> & rolling b<br />
/ ζ *<br />
V * 15<br />
0<br />
0 1 2 3 4 5<br />
Figure 11. Cylinder speeds with s<strong><strong>an</strong>d</strong>paper-coated inner cylinders. P<strong>an</strong>el (a) shows average<br />
speeds of the outer<br />
Grade<br />
cylinder scaled by<br />
220<br />
V<br />
150 120 80 50 Smooth<br />
∗ against slope for the steel inner cylinder <strong><strong>an</strong>d</strong> 500<br />
centiStoke silicone oil. Inferred The stars (mm) indicate 0.3the 0.4 speeds 0.5with 1the1.6 usual, smooth 0.05 cylinder. In p<strong>an</strong>el<br />
(b), a further scalingExpected of ζ ∗ /2 is(mm) used to0.07 collapse 0.09the 0.12 data. 0.2 The 0.36 values of ζ ∗ are calculated using<br />
the roughness scales, Expected σ, listed = average in table particle 3. κ(t) The diameter inset ≡ ɛ(t) plots quoted<br />
the by<br />
κinferred the CAMI σ−values st<strong><strong>an</strong>d</strong>ard against the me<strong>an</strong><br />
∗ = ɛ ∗<br />
particle size of the s<strong><strong>an</strong>d</strong>paper (according to the Americ<strong>an</strong> CAMI st<strong><strong>an</strong>d</strong>ard).<br />
Table For 3. small Roughness slopes scales the for the various grades of s<strong><strong>an</strong>d</strong>paper (as given by the “grit” value<br />
microns. listed). The This “inferred” estimatevalue is consistent indicates with the number images used takento of collapse the surface the data of the in figure cylinders 11; the<br />
“expected” contact value force isprevents<br />
the number V quoted = bMgδ<br />
with a microscope which revealed roughness by theof Americ<strong>an</strong> × sin α<br />
that order. CAMI × √ 1st<strong><strong>an</strong>d</strong>ard − κ <strong><strong>an</strong>d</strong> refers to average<br />
4νm<br />
′′<br />
2 ∗<br />
particle slipping size. <strong><strong>an</strong>d</strong> the system<br />
a } {{ }<br />
To explore further the dependence of } cylinder {{ } speed on surface ≡ζroughness, we conducted<br />
more<br />
rolls<br />
experiments<br />
with const<strong>an</strong>t<br />
in which<br />
speed<br />
∗<br />
the steel cylinder ≡V ∗ was first covered with differing grades of<br />
s<strong><strong>an</strong>d</strong>paper (more specifically, we used 50, 80 120, 150 <strong><strong>an</strong>d</strong> 220 “grit”, Americ<strong>an</strong> CAMI<br />
0.08 50 grit CAMI vs σ (mm)<br />
0.05<br />
Mg sin α<br />
M + m b + 1 2 m a<br />
s ≡ a δ<br />
δ<br />
M<br />
sin α<br />
m<br />
′ a<br />
2(1 + 2µ) 2 , µ ≡ M + m<br />
δ<br />
t<br />
← sinα<br />
m a
Ω b ∝ t −q , X b (t) ∝ t 1−q , q ≡<br />
Conclusions<br />
3(1 + 4µ )<br />
2(1 + 2µ) 2 , µ ≡ M + m<br />
m a<br />
<br />
<br />
<br />
<br />
Mg sin α<br />
S<strong><strong>an</strong>d</strong>paper experiments X˙<br />
show b = that surface roughness controls<br />
the speed of descent<br />
M +<br />
in<br />
mrocking b + 1 2 m t<br />
aregime.<br />
s ≡ a δ<br />
M<br />
sin α<br />
m<br />
′ a<br />
The κ_✳ theory has some success in rationalizing<br />
experimental results. But κ(t) κ_✳ ≡ ɛ(t) is not κ ∗ completely = ɛ ∗<br />
convincing.<br />
V = bMgδ<br />
4νm a<br />
′′<br />
} {{ }<br />
≡V ∗<br />
Nonetheless, I am now officially declaring victory over<br />
the snail cylinder <strong><strong>an</strong>d</strong> the snail ball.<br />
δ<br />
δ<br />
× sin α × √ 1 − κ 2 ∗<br />
} {{ }<br />
≡ζ ∗<br />
For example, the experimental<br />
dependence on α is not this simple.<br />
Other <strong>incline</strong>d-pl<strong>an</strong>e problems are diverting....
A Gr<strong>an</strong>ular Snail Cylinder