
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 5 Control Functions<br />
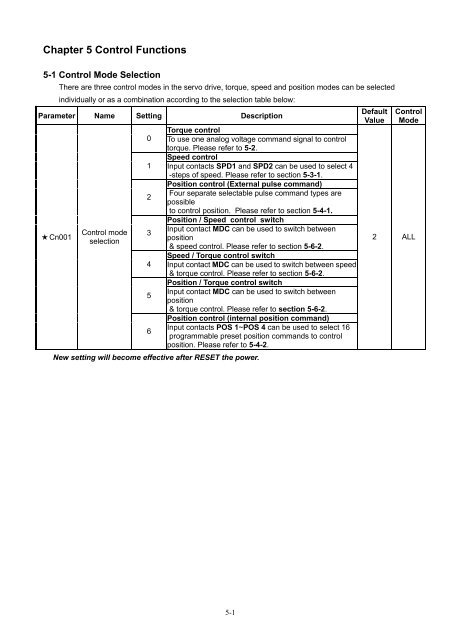
5-1 Control Mode Selection<br />
There are three control modes in the servo drive, torque, speed and position modes can be selected<br />
individually or as a <strong>com</strong>bination according to the selection table below:<br />
Parameter Name Setting Description<br />
★ Cn001<br />
Control mode<br />
selection<br />
Torque control<br />
0 To use one analog voltage <strong>com</strong>mand signal to control<br />
torque. Please refer to 5-2.<br />
Speed control<br />
1 Input contacts SPD1 and SPD2 can be used to select 4<br />
-steps of speed. Please refer to section 5-3-1.<br />
Position control (External pulse <strong>com</strong>mand)<br />
Four separate selectable pulse <strong>com</strong>mand types are<br />
2<br />
possible<br />
to control position. Please refer to section 5-4-1.<br />
3<br />
Position / Speed control switch<br />
Input contact MDC can be used to switch between<br />
position<br />
& speed control. Please refer to section 5-6-2.<br />
Speed / Torque control switch<br />
4 Input contact MDC can be used to switch between speed<br />
& torque control. Please refer to section 5-6-2.<br />
Position / Torque control switch<br />
5<br />
6<br />
Input contact MDC can be used to switch between<br />
position<br />
& torque control. Please refer to section 5-6-2.<br />
Position control (internal position <strong>com</strong>mand)<br />
Input contacts POS 1~POS 4 can be used to select 16<br />
programmable preset position <strong>com</strong>mands to control<br />
position. Please refer to 5-4-2.<br />
New setting will be<strong>com</strong>e effective after RESET the power.<br />
Default<br />
Value<br />
Control<br />
Mode<br />
2 ALL<br />
5-1