


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
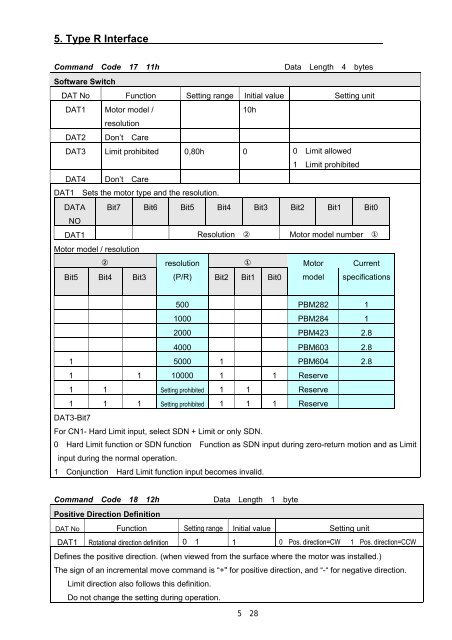
5. Type R Interface <br />
Command Code1711h<br />
Data Length4 bytes<br />
Software Switch <br />
DAT No Function Setting range Initial value Setting unit<br />
DAT1 Motor model / 10h <br />
resolution<br />
DAT2 Don’t Care <br />
DAT3 Limit prohibited 0,80h 0 0Limit allowed<br />
1Limit prohibited<br />
DAT4 Don’t Care <br />
DAT1Sets the motor type and the resolution.<br />
DATA Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0<br />
NO<br />
DAT1 Resolution Motor model number<br />
Motor model / resolution<br />
<br />
resolution<br />
<br />
Motor Current<br />
Bit5 Bit4 Bit3 (P/R) Bit2 Bit1 Bit0 model specifications<br />
<br />
500 PBM282 1<br />
1000 PBM284 1<br />
2000 PBM423 2.8<br />
4000 PBM603 2.8<br />
1 5000 1 PBM604 2.8<br />
1 1 10000 1 1 Reserve <br />
1 1 Setting prohibited 1 1 Reserve <br />
1 1 1 Setting prohibited 1 1 1 Reserve <br />
DAT3-Bit7<br />
For CN1- Hard Limit input, select SDN + Limit or only SDN.<br />
0Hard Limit function or SDN functionFunction as SDN input during zero-return motion and as Limit<br />
input during the normal operation.<br />
1ConjunctionHard Limit function input becomes invalid.<br />
<br />
Command Code1812h<br />
Data Length1 byte<br />
Positive Direction Definition <br />
DAT No Function Setting range Initial value Setting unit<br />
DAT1 Rotational direction definition 01 1 0Pos. direction=CW 1Pos. direction=CCW<br />
Defines the positive direction. (when viewed from the surface where the motor was installed.)<br />
The sign of an incremental move command is “+" for positive direction, and “-“ for negative direction.<br />
Limit direction also follows this definition.<br />
Do not change the setting during operation.<br />
528













