


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Pulse Train Input Interface <br />
<br />
<br />
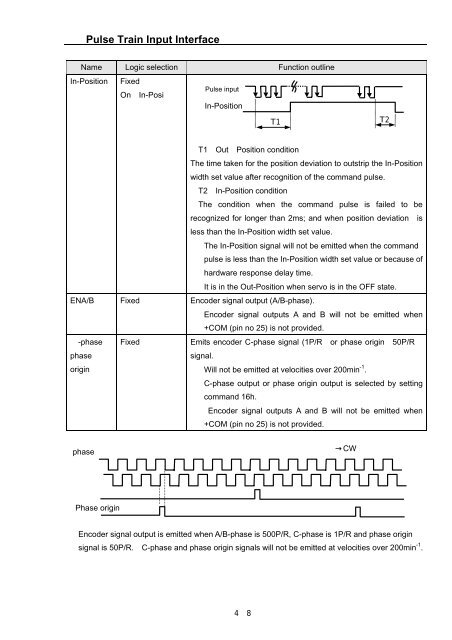
Name Logic selection Function outline<br />
In-Position<br />
Fixed<br />
OnIn-Posi<br />
Pulse input<br />
In-Position<br />
T1<br />
T2<br />
T1Out Position condition<br />
The time taken for the position deviation to outstrip the In-Position<br />
width set value after recognition of the command pulse.<br />
T2In-Position condition<br />
The condition when the command pulse is failed to be<br />
recognized for longer than 2ms; and when position deviation is<br />
less than the In-Position width set value.<br />
The In-Position signal will not be emitted when the command<br />
pulse is less than the In-Position width set value or because of<br />
hardware response delay time.<br />
It is in the Out-Position when servo is in the OFF state.<br />
ENA/B Fixed Encoder signal output (A/B-phase).<br />
Encoder signal outputs A and B will not be emitted when<br />
+COM (pin no 25) is not provided.<br />
-phase<br />
phase<br />
origin<br />
Fixed<br />
Emits encoder C-phase signal (1P/Ror phase origin50P/R<br />
signal.<br />
Will not be emitted at velocities over 200min -1 .<br />
C-phase output or phase origin output is selected by setting<br />
command 16h.<br />
Encoder signal outputs A and B will not be emitted when<br />
+COM (pin no 25) is not provided.<br />
phase<br />
<br />
<br />
<br />
Phase origin<br />
CW<br />
Encoder signal output is emitted when A/B-phase is 500P/R, C-phase is 1P/R and phase origin<br />
signal is 50P/R. C-phase and phase origin signals will not be emitted at velocities over 200min -1 .<br />
<br />
48













