


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
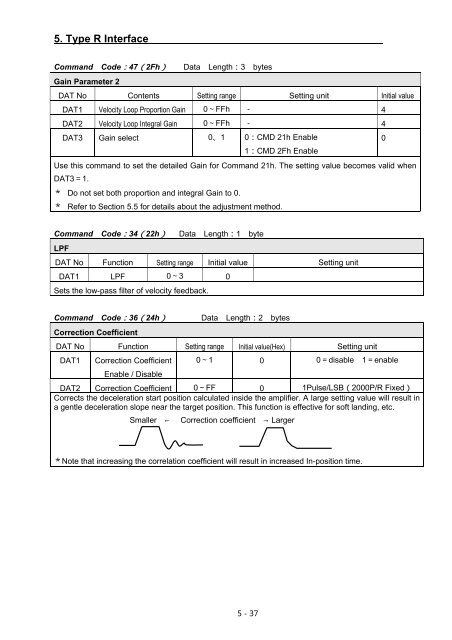
5. Type R Interface <br />
<br />
Command Code472Fh<br />
Data Length3 bytes<br />
Gain Parameter 2 <br />
DAT No Contents Setting range Setting unit Initial value<br />
DAT1 Velocity Loop Proportion Gain 0FFh 4<br />
DAT2 Velocity Loop Integral Gain 0FFh 4<br />
DAT3 Gain select 01 0CMD 21h Enable<br />
1CMD 2Fh Enable<br />
Use this command to set the detailed Gain for Command 21h. The setting value becomes valid when<br />
DAT31.<br />
Do not set both proportion and integral Gain to 0.<br />
Refer to Section 5.5 for details about the adjustment method.<br />
<br />
Command Code3422h<br />
Data Length1 byte <br />
LPF <br />
DAT No Function Setting range Initial value Setting unit<br />
DAT1 LPF 03 0<br />
Sets the low-pass filter of velocity feedback.<br />
<br />
Command Code3624h<br />
Data Length2 bytes<br />
Correction Coefficient <br />
DAT No Function Setting range Initial value(Hex) Setting unit<br />
DAT1<br />
Correction Coefficient<br />
Enable / Disable<br />
01 0 0disable 1enable<br />
DAT2 Correction Coefficient 0FF 0 1Pulse/LSB2000P/R Fixed<br />
Corrects the deceleration start position calculated inside the amplifier. A large setting value will result in<br />
a gentle deceleration slope near the target position. This function is effective for soft landing, etc.<br />
Smaller Correction coefficient Larger<br />
0<br />
Note that increasing the correlation coefficient will result in increased In-position time.<br />
537













