

Linear Algebra Exercises-n-Answers.pdf
Linear Algebra Exercises-n-Answers.pdf
Linear Algebra Exercises-n-Answers.pdf

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Answers</strong> to <strong>Exercises</strong> 177<br />
4 If p 1 , p 2 , p 3 , and q 1 , q 2 , q 3 are two triples of homogeneous coordinates for p then the two column<br />
vectors are in proportion, that is, lie on the same line through the origin. Similarly, the two row vectors<br />
are in proportion.<br />
⎛<br />
k · ⎝ p ⎞ ⎛<br />
1<br />
p 2<br />
⎠ = ⎝ q ⎞<br />
1<br />
q 2<br />
⎠ m · (L ) ( )<br />
1 L 2 L 3 = M1 M 2 M 3<br />
p 3 q 3<br />
Then multiplying gives the answer (km) · (p 1 L 1 + p 2 L 2 + p 3 L 3 ) = q 1 M 1 + q 2 M 2 + q 3 M 3 = 0.<br />
5 The picture of the solar eclipse — unless the image plane is exactly perpendicular to the line from<br />
the sun through the pinhole — shows the circle of the sun projecting to an image that is an ellipse.<br />
(Another example is that in many pictures in this Topic, the circle that is the sphere’s equator is drawn<br />
as an ellipse, that is, is seen by a viewer of the drawing as an ellipse.)<br />
The solar eclipse picture also shows the converse. If we picture the projection as going from left to<br />
right through the pinhole then the ellipse I projects through P to a circle S.<br />
6 A spot on the unit sphere<br />
⎛ ⎞<br />
p 1<br />
⎝p 2<br />
⎠<br />
p 3<br />
is non-equatorial if and only if p 3 ≠ 0. In that case it corresponds to this point on the z = 1 plane<br />
⎛<br />
⎝ p ⎞<br />
1/p 3<br />
p 2 /p 3<br />
⎠<br />
1<br />
since that is intersection of the line containing the vector and the plane.<br />
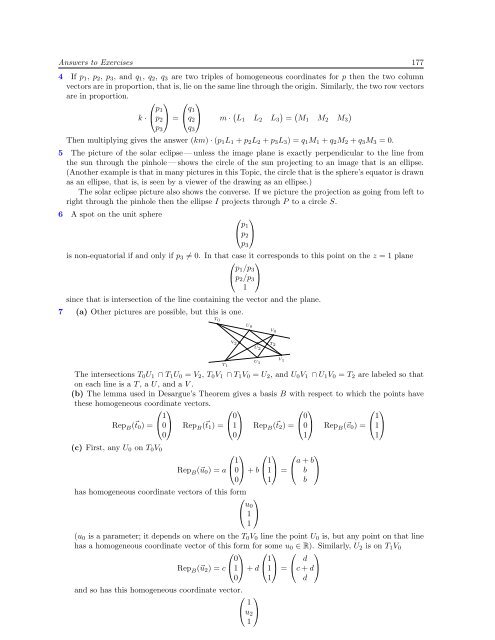
7 (a) Other pictures are possible, but this is one.<br />
T 0<br />
0<br />
V 0<br />
V 2<br />
U 2<br />
T 2<br />
T 1<br />
U 1<br />
V 1<br />
The intersections T 0 U 1 ∩ T 1 U 0 = V 2 , T 0 V 1 ∩ T 1 V 0 = U 2 , and U 0 V 1 ∩ U 1 V 0 = T 2 are labeled so that<br />
on each line is a T , a U, and a V .<br />
(b) The lemma used in Desargue’s Theorem gives a basis B with respect to which the points have<br />
these homogeneous coordinate vectors.<br />
⎛ ⎞<br />
⎛ ⎞<br />
⎛ ⎞<br />
⎛ ⎞<br />
Rep B (⃗t 0 ) =<br />
⎝ 1 0⎠ Rep B (⃗t 1 ) =<br />
0<br />
⎝ 0 1<br />
0<br />
⎠ Rep B (⃗t 2 ) =<br />
⎝ 0 0⎠ Rep B (⃗v 0 ) =<br />
1<br />
⎝ 1 1<br />
1<br />
⎠<br />
(c) First, any U 0 on T 0 V 0<br />
⎛<br />
Rep B (⃗u 0 ) = a ⎝ 1 ⎞ ⎛<br />
0⎠ + b ⎝ 1 ⎞ ⎛<br />
1⎠ = ⎝ a + b<br />
⎞<br />
b ⎠<br />
0 1 b<br />
has homogeneous coordinate vectors of this form ⎛<br />
⎝ u ⎞<br />
0<br />
1 ⎠<br />
1<br />
(u 0 is a parameter; it depends on where on the T 0 V 0 line the point U 0 is, but any point on that line<br />
has a homogeneous coordinate vector of this form for some u 0 ∈ R). Similarly, U 2 is on T 1 V 0<br />
⎛<br />
Rep B (⃗u 2 ) = c ⎝ 0 ⎞ ⎛<br />
1⎠ + d ⎝ 1 ⎞ ⎛<br />
1⎠ = ⎝<br />
d<br />
⎞<br />
c + d⎠<br />
0 1 d<br />
and so has this homogeneous coordinate vector.<br />
⎛<br />
⎞<br />
⎝ 1 u 2<br />
⎠<br />
1














