

Linear Algebra Exercises-n-Answers.pdf
Linear Algebra Exercises-n-Answers.pdf
Linear Algebra Exercises-n-Answers.pdf

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
170 <strong>Linear</strong> <strong>Algebra</strong>, by Hefferon<br />
Four.II.1.24 Any permutation matrix has the property that the transpose of the matrix is its inverse.<br />
For the implication, we know that |A trans | = |A|. Then 1 = |A · A −1 | = |A · A trans | = |A| · |A trans | =<br />
|A| 2 .<br />
The converse does not hold; here is an example.<br />
( ) 3 1<br />
2 1<br />
Four.II.1.25<br />
of volume.<br />
Four.II.1.26<br />
Where the sides of the box are c times longer, the box has c 3 times as many cubic units<br />
If H = P −1 GP then |H| = |P −1 ||G||P | = |P −1 ||P ||G| = |P −1 P ||G| = |G|.<br />
Four.II.1.27 ( ) ((a) ) The new ( basis ( is the old basis rotated by π/4.<br />
−1 0 0 1<br />
(b) 〈 , 〉, 〈 , 〉<br />
0 −1 −1)<br />
0)<br />
(c) In each case the determinant is +1 (these bases are said to have positive orientation).<br />
(d) Because only one sign can change at a time, the only other cycle possible is<br />
( ( ( (<br />
+ + − −<br />
· · · −→ −→ −→ −→ −→ · · · .<br />
+)<br />
−)<br />
−)<br />
+)<br />
Here each associated determinant is −1 (such bases are said to have a negative orientation).<br />
(e) There is one positively oriented basis 〈(1)〉 and one negatively oriented basis 〈(−1)〉.<br />
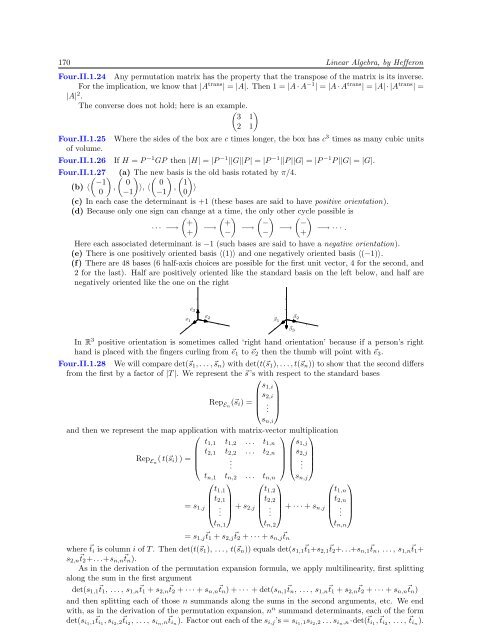
(f) There are 48 bases (6 half-axis choices are possible for the first unit vector, 4 for the second, and<br />
2 for the last). Half are positively oriented like the standard basis on the left below, and half are<br />
negatively oriented like the one on the right<br />
⃗e 3<br />
⃗e<br />
⃗e 2<br />
⃗ β2 ⃗<br />
1 β1<br />
In R 3 positive orientation is sometimes called ‘right hand orientation’ because if a person’s right<br />
hand is placed with the fingers curling from ⃗e 1 to ⃗e 2 then the thumb will point with ⃗e 3 .<br />
Four.II.1.28 We will compare det(⃗s 1 , . . . , ⃗s n ) with det(t(⃗s 1 ), . . . , t(⃗s n )) to show that the second differs<br />
from the first by a factor of |T |. We represent the ⃗s ’s with respect to the standard bases<br />
⎛ ⎞<br />
s 1,i<br />
s 2,i<br />
Rep En<br />
(⃗s i ) = ⎜<br />
⎝<br />
⎟<br />
. ⎠<br />
s n,i<br />
and then we represent the map application with matrix-vector multiplication<br />
⎛<br />
⎞ ⎛ ⎞<br />
t 1,1 t 1,2 . . . t 1,n s 1,j<br />
t 2,1 t 2,2 . . . t 2,n<br />
s 2,j<br />
Rep En<br />
( t(⃗s i ) ) = ⎜<br />
⎟ ⎜ ⎟<br />
⎝ .<br />
⎠ ⎝ . ⎠<br />
t n,1 t n,2 . . . t n,n s n,j<br />
⎛ ⎞ ⎛ ⎞<br />
⎛ ⎞<br />
t 1,1 t 1,2<br />
t 1,n<br />
t 2,1<br />
= s 1,j ⎜ ⎟<br />
⎝ . ⎠ + s t 2,2<br />
2,j ⎜ ⎟<br />
⎝ . ⎠ + · · · + s t 2,n<br />
n,j ⎜ ⎟<br />
⎝ . ⎠<br />
t n,1 t n,2 t n,n<br />
= s 1,j<br />
⃗t 1 + s 2,j<br />
⃗t 2 + · · · + s n,j<br />
⃗t n<br />
where ⃗t i is column i of T . Then det(t(⃗s 1 ), . . . , t(⃗s n )) equals det(s 1,1<br />
⃗t 1 +s 2,1<br />
⃗t 2 +. . .+s n,1<br />
⃗t n , . . . , s 1,n<br />
⃗t 1 +<br />
s 2,n<br />
⃗t 2 +. . .+s n,n<br />
⃗t n ).<br />
As in the derivation of the permutation expansion formula, we apply multilinearity, first splitting<br />
along the sum in the first argument<br />
det(s 1,1<br />
⃗t 1 , . . . , s 1,n<br />
⃗t 1 + s 2,n<br />
⃗t 2 + · · · + s n,n<br />
⃗t n ) + · · · + det(s n,1<br />
⃗t n , . . . , s 1,n<br />
⃗t 1 + s 2,n<br />
⃗t 2 + · · · + s n,n<br />
⃗t n )<br />
and then splitting each of those n summands along the sums in the second arguments, etc. We end<br />
with, as in the derivation of the permutation expansion, n n summand determinants, each of the form<br />
det(s i1 ,1 ⃗ t i1 , s i2 ,2 ⃗ t i2 , . . . , s in ,n ⃗ t in ). Factor out each of the s i,j ’s = s i1 ,1s i2 ,2 . . . s in ,n ·det(⃗t i1 ,⃗t i2 , . . . , ⃗t in ).<br />
⃗β 3














