

Direct Torque Control with Space Vector Modulation (DTC-SVM) of ...
Direct Torque Control with Space Vector Modulation (DTC-SVM) of ...
Direct Torque Control with Space Vector Modulation (DTC-SVM) of ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Sensorless Speed <strong>Direct</strong> <strong>Torque</strong> <strong>Control</strong> <strong>with</strong> <strong>Space</strong> <strong>Vector</strong> <strong>Modulation</strong> (<strong>DTC</strong>-<strong>SVM</strong>)<br />
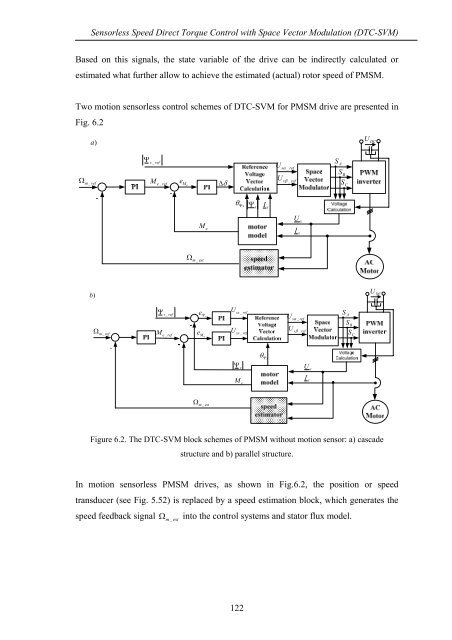
Based on this signals, the state variable <strong>of</strong> the drive can be indirectly calculated or<br />
estimated what further allow to achieve the estimated (actual) rotor speed <strong>of</strong> PMSM.<br />
Two motion sensorless control schemes <strong>of</strong> <strong>DTC</strong>-<strong>SVM</strong> for PMSM drive are presented in<br />
Fig. 6.2<br />
a)<br />
U DC<br />
Ω m _ ref<br />
Ψ s _ ref<br />
M e _ ref<br />
e Me<br />
∆δ<br />
U<br />
s α _ ref<br />
U<br />
s β _ ref<br />
S<br />
A<br />
S B<br />
S C<br />
θ Ψ s<br />
Ψ<br />
s<br />
I<br />
s<br />
U s<br />
M e<br />
I s<br />
Ω m _ est<br />
b)<br />
U DC<br />
Ω m _ ref<br />
Ψ s _ ref<br />
M e _ ref<br />
e Ψ s<br />
e M e<br />
U sx _ ref<br />
U sy _ ref<br />
U<br />
s α _ ref<br />
U<br />
s β _ ref<br />
S A<br />
S B<br />
S C<br />
Ψ<br />
s<br />
M<br />
e<br />
θ Ψs<br />
U s<br />
I<br />
s<br />
Ω m _ est<br />
Figure 6.2. The <strong>DTC</strong>-<strong>SVM</strong> block schemes <strong>of</strong> PMSM <strong>with</strong>out motion sensor: a) cascade<br />
structure and b) parallel structure.<br />
In motion sensorless PMSM drives, as shown in Fig.6.2, the position or speed<br />
transducer (see Fig. 5.52) is replaced by a speed estimation block, which generates the<br />
speed feedback signal Ω into the control systems and stator flux model.<br />
m_<br />
est<br />
122












![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
