

Direct Torque Control with Space Vector Modulation (DTC-SVM) of ...
Direct Torque Control with Space Vector Modulation (DTC-SVM) of ...
Direct Torque Control with Space Vector Modulation (DTC-SVM) of ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Direct</strong> <strong>Torque</strong> <strong>Control</strong> <strong>with</strong> <strong>Space</strong> <strong>Vector</strong> <strong>Modulation</strong><br />
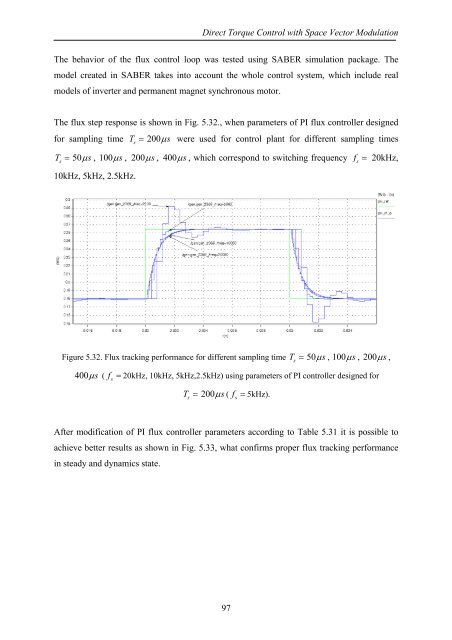
The behavior <strong>of</strong> the flux control loop was tested using SABER simulation package. The<br />
model created in SABER takes into account the whole control system, which include real<br />
models <strong>of</strong> inverter and permanent magnet synchronous motor.<br />
The flux step response is shown in Fig. 5.32., when parameters <strong>of</strong> PI flux controller designed<br />
for sampling time T s<br />
= 200µ s were used for control plant for different sampling times<br />
T<br />
s<br />
= 50µ s , 100µ s , 200µ s , 400µ s , which correspond to switching frequency f<br />
s<br />
= 20kHz,<br />
10kHz, 5kHz, 2.5kHz.<br />
Figure 5.32. Flux tracking performance for different sampling time T<br />
s<br />
= 50µ s , 100µ s , 200µ s ,<br />
400µ s ( f<br />
s<br />
= 20kHz, 10kHz, 5kHz,2.5kHz) using parameters <strong>of</strong> PI controller designed for<br />
T<br />
s<br />
= 200µ s ( f<br />
s<br />
= 5kHz).<br />
After modification <strong>of</strong> PI flux controller parameters according to Table 5.31 it is possible to<br />
achieve better results as shown in Fig. 5.33, what confirms proper flux tracking performance<br />
in steady and dynamics state.<br />
97












![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
