User manual - JG Technologies
User manual - JG Technologies
User manual - JG Technologies

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
D12214-1<br />
D12215-1<br />
D12216-1<br />
12.11 Using radar to measure distances,<br />
ranges, and bearings<br />
When you are using the radar application, you can measure<br />
distances, ranges and bearings in a variety of ways.<br />
These options are detailed in the table below:<br />
Functions<br />
Range Rings<br />
Distances<br />
Between Points<br />
Yes<br />
(approximate<br />
distance)<br />
Range From<br />
Your Vessel<br />
Yes<br />
(approximate<br />
range)<br />
Cursor No Yes Yes<br />
Variable Range<br />
Markers /<br />
Electronic<br />
Bearing Lines<br />
(VRM/EBL)<br />
Bearings<br />
No<br />
No Yes Yes<br />
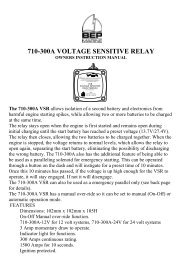
A Variable Range Marker (VRM) is a circle centred on your vessel’s<br />
position and fixed with respect to the heading mode. When this<br />
circle is adjusted to align with a target, its range from your vessel<br />
is measured and displayed on the Radar context menu when you<br />
select the VRM with the cursor.<br />
Electronic Bearing Lines (EBL)<br />
An Electronic Bearing Line (EBL) is a line drawn from your vessel<br />
to the edge of the window. When this line is rotated to align with a<br />
target, its bearing relative to your vessel’s heading is measured and<br />
displayed on the Radar context menu when you select the VRM<br />
with the cursor.<br />
The VRM/EBL are combined to measure both the range and the<br />
bearing of the specified target.<br />
1 2 3<br />
4<br />
0.624nm<br />
56°S<br />
Floating<br />
VRM/EBL<br />
Yes No Yes<br />
VRM/EBL<br />
Measuring using the range rings<br />
Use the range rings to gauge the approximate distances between<br />
points. Range rings are concentric circles displayed on the screen<br />
and centred from your vessel at pre-set distances. The number and<br />
spacing of the rings changes as you range in and out.<br />
Examples:<br />
D8403-2<br />
Item<br />
Description<br />
1 VRM<br />
2 Target<br />
Range — 1/4 nm<br />
Range Rings — 760ft<br />
apart<br />
Range — 3/4 nm<br />
Range Rings — 1/4 nm<br />
apart<br />
Range — 1 1/2 nm<br />
Range Rings — 1/4 nm<br />
apart<br />
3 EBL<br />
4 Range and bearing<br />
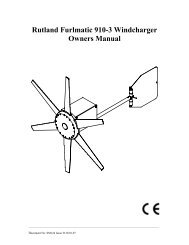
Measuring using the cursor<br />
To measure the bearing and range from your vessel to a specified<br />
target, move the cursor to the appropriate position on the screen<br />
and press Ok, the radar context menu will be displayed which shall<br />
provide:<br />
• Latitude<br />
• Longitude<br />
• Range<br />
• Bearing<br />
1 2<br />
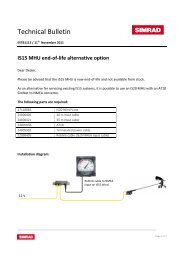
Measuring using floating VRM/EBL<br />
You can use the VRM/EBL float function to measure the range and<br />
bearing between any two points on the radar screen. This function<br />
allows you to move the VRM/EBL centre away from your vessel’s<br />
position and onto a target. You can then change the radius of the<br />
VRM to determine the distance between two points and change the<br />
angle of the EBL, relative to its new origin, to obtain the bearing.<br />
1<br />
0.471nm<br />
55°P<br />
2 3<br />
VRM/EBL<br />
D12218-1<br />
Item<br />
Description<br />
1. Cursor<br />
D12217-1<br />
2. Bearing and range from your vessel to<br />
the cursor position<br />
Item<br />
Description<br />
1 Range and bearing<br />
2 Target 1<br />
3 Target 2<br />
You can also display the cursor position in the databar, from the<br />
homescreen select: Customize > Databar Set-up > Edit Databar,<br />
now select the data box where you want the cursor position to be<br />
displayed. Select Navigation > Cursor Position.<br />
Measuring using VRM/EBL<br />
Variable Range Markers (VRM)<br />
138 e7 / e7D / e95 / e97 / e125 / e127 / c95 / c97 / c125 / c127