8 Dust and Splash-Proof types - Intelligent Actuator
8 Dust and Splash-Proof types - Intelligent Actuator 8 Dust and Splash-Proof types - Intelligent Actuator
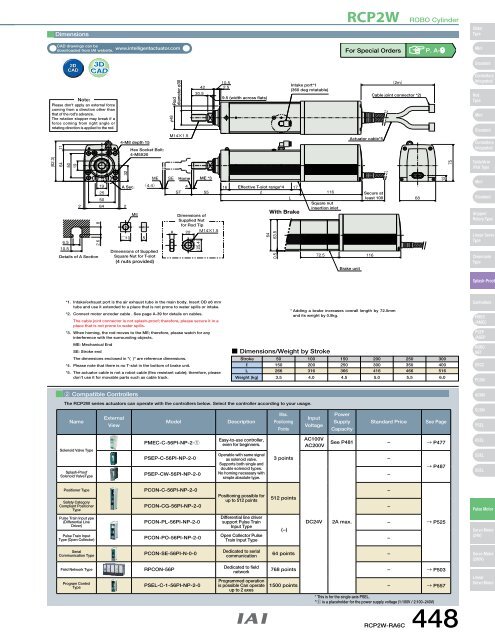
Dimensions RCP2W ROBO Cylinder Slider Type For Special Orders P. A-9 Mini Standard Note: Please don't apply an external force coming from a direction other than that of the rod's advance. The rotation stopper may break if a force coming from right angle or rotating direction is applied to the rod. Rod diameter ø30 9.5 (width across flats) Intake port*1 (360 deg rotatable) Cable joint connector *2) Controllers Integrated Rod Type Mini Standard 4-M8 depth 15 Hex Socket Bolt: 4-M5X20 Actuator cable*5 Controllers Integrated Table/Arm /Flat Type A Sec. Home ME *3 Dimensions of Supplied Nut for Rod Tip Effective T-slot range*4 With Brake Square nut insertion inlet Secure at least 100 Mini Standard Gripper/ Rotary Type Linear Servo Type Details of A Section Dimensions of Supplied Square Nut for T-slot (4 nuts provided) Brake unit Cleanroom Type Splash-Proof *1. Intake/exhaust port is the air exhaust tube in the main body. Insert OD ø6 mm tube and use it extended to a place that is not prone to water spills or intake. *2. Connect motor encoder cable . See page A-39 for details on cables. The cable joint connector is not splash-proof; therefore, please secure it in a place that is not prone to water spills. *3. When homing, the rod moves to the ME; therefore, please watch for any interference with the surrounding objects. ME: Mechanical End SE: Stroke end The dimensions enclosed in "( )" are reference dimensions. *4. Please note that there is no T-slot in the bottom of brake unit. *5. The actuator cable is not a robot cable (flex resistant cable); therefore, please don't use it for movable parts such as cable track. Dimensions/Weight by Stroke Stroke 50 100 150 200 250 300 l L Weight (kg) 150 266 3.5 * Adding a brake increases overall length by 72.5mm and its weight by 0.9kg. 200 316 4.0 250 366 4.5 300 416 5.0 350 466 5.5 400 516 6.0 Controllers PMEC /AMEC PSEP /ASEP ROBO NET ERC2 PCON 2 Compatible Controllers ACON The RCP2W series actuators can operate with the controllers below. Select the controller according to your usage. Max. External Input Name Model Description Positioning View Voltage Points Power Supply Capacity Standard Price See Page SCON PSEL PMEC-C-56PI-NP-21 Easy-to-use controller, even for beginners. AC100V AC200V See P481 − P477 Solenoid Valve Type PSEP-C-56PI-NP-2-0 Operable with same signal as solenoid valve. 3 points − Supports both single and double solenoid types. Splash-Proof No homing necessary with Solenoid ValveType PSEP-CW-56PI-NP-2-0 simple absolute type. − P487 ASEL SSEL XSEL Positioner Type Safety Category Compliant Positioner Type Pulse Train Input ype (Differential Line Driver) Pulse Train Input Type (Open Collector) PCON-C-56PI-NP-2-0 PCON-CG-56PI-NP-2-0 PCON-PL-56PI-NP-2-0 PCON-PO-56PI-NP-2-0 Positioning possible for up to 512 points Differential line driver support Pulse Train Input Type Open Collector Pulse Train Input Type 512 points (−) DC24V 2A max. − − − − P525 Pulse Motor Servo Motor (24V) Serial Communication Type PCON-SE-56PI-N-0-0 Dedicated to serial communication 64 points − Servo Motor (200V) Field Network Type Program Control Type RPCON-56P PSEL-C-1-56PI-NP-2-0 Dedicated to field network Programmed operation is possible Can operate up to 2 axes 768 points − P503 1500 points − P557 * This is for the single-axis PSEL. 1 is a placeholder for the power supply voltage (1:100V / 2:100~240V) RCP2W-RA6C 448 Linear Servo Motor
Slider Type Mini Standard Controllers Integrated RCP2W ROBO Cylinder RCP2W-RA10C ROBO Cylinder High-thrust Dust-proof Rod Type 100mm Width Coupled Configuration: RCP2W RA10C I 86P P2 Pulse Motor Series Type Encoder Motor Lead Stroke Compatible Controllers Cable Length Option Rod Type Mini I: Incremental Type 86P: Pulse motor 86 size * See page Pre-35 for explanation of each code that makes up the configuration name. 10 : 10mm 5 : 5mm 2.5 : 2.5mm 50: 50mm 300: 300mm (50mm pitch increments) P2 : PCON-CF N : None P : 1m S : 3m M : 5m X : Custom Length R : Robot Cable A1~A3 : Connector cable Cable outlet direction changed B : Brake-Equipped FL : With Flange FT : With Foot bracket Standard Controllers Integrated Table/Arm /Flat Type Mini Standard Gripper/ Rotary Type Linear Servo Type Cleanroom Type Splash-Proof Controllers PMEC /AMEC P O I N T Notes on Selection Technical References P. A-5 (1) Minimum speed is set for each lead. (Lead 10: 10mm/s, Lead 5: 5mm/s, Lead 2.5: 1mm/s) Please note that vibration etc. may occur when operated at minimum speed. (2) Since the RCP2 series use a pulse motor, the load capacity decreases at high speeds. Check the Speed vs. Load Capacity on the right hand graph to see if your desired speed and load capacity are supported. (3) The load capacity is based on operation at lead 10: 0.04G, lead 5: 0.02G and lead 2.5: 0.01G. These values are the upper limits for the acceleration. Also, this is when the load capacity is attached to the external guide. The rotation stopper may break if an external force coming from a direction other than that of rod's advance is applied. (4) The cable joint connector is not splash-proof; secure it in a place that is not prone to water spills. Load Capacity (kg) Load Capacity (kg) Speed vs. Load Capacity Due to the characteristics of the Pulse motor, the RCP2 series' load capacity decreases at high speeds. In the table below, check if your desired speed and load capacity are supported. 1000 Horizontal 300 2.5mm lead 150 5mm lead 100 80 10mm lead 15 10 0 50 100 150 200 250 300 Speed (mm/s) 1000 Vertical 150 2.5mm lead 100 80 10mm lead 10 10 6 5mm lead 3 1 0 50 100 150 200 Speed (mm/s) PSEP /ASEP ROBO NET ERC2 PCON ACON SCON PSEL ASEL SSEL XSEL Pulse Motor Actuator Specifications Lead and Load Capacity Legend 1 Stroke 2 Cable length 3 Options 1 Stroke List 2 Cable List 50 100 150 200 250 300 Model RCP2W-RA10C-I-86P-10- 1 -P2- 2 - 3 RCP2W-RA10C-I-86P-5- 1 -P2- 2 - 3 RCP2W-RA10C-I-86P-2.5- 1 -P2- 2 - 3 Stroke (mm) Standard Price − − − − − − (Note 1) Please note that the maximum load capacity decreases as the speed increases. Lead (mm) 10 5 2.5 Max. Load Capacity (Note 1) Maximum Push Force Horizontal(kg) Vertical(kg) (N) (Note 2) ~80 ~80 1500 150 300 ~100 ~150 3000 6000 Stroke (mm) 50~300 (50mm increments) (Note 2) See page A-70 for push force graph. Type Standard Special Lengths Robot Cable Stroke and Maximum Speed Lead 10 5 2.5 Stroke * The value inside < > applies to vertical setting. (Unit: mm/s) Cable Symbol P (1m) S (3m) M (5m) X06 (6m) ~ X10 (10m) X11 (11m) ~ X15 (15m) X16 (16m) ~ X20 (20m) R01 (1m) ~ R03 (3m) R04 (4m) ~ R05 (5m) R06 (6m) ~ R10 (10m) R11 (11m) ~ R15 (15m) R16 (16m) ~ R20 (20m) * See page A-39 for cables for maintenance. 50~300 (50mm increments) 250167 125 63 Standard Price − − − − − − − − − − − Servo Motor (24V) Servo Motor (200V) Linear Servo Motor 3 Option List Actuator Specifications Name Connector cable outlet direction changed Brake Flange Foot bracket 449 RCP2W-RA10C Option Code A1~A3 B FL FT See Page A-25 A-25 A-27 A-29 Standard Price − − − − Item Drive System Positioning Repeatability Lost Motion Rod diameter Rod non-rotational accuracy Protection Structure Ambient Operating Temp./Humidity Description Ball screw C10 grade ±0.02mm 0.1 mm or less ø40mm ±1.0 degrees IP54 0~40°C, 85%RH or less (Non-condensing)
- Page 1 and 2: Dust-proof/Splash-proof Type Dust-p
- Page 3 and 4: Slider Type Mini Standard Controlle
- Page 5 and 6: Slider Type Mini Standard Controlle
- Page 7: Slider Type Mini Standard Controlle
- Page 11 and 12: Slider Type Mini Standard Controlle
- Page 13 and 14: Slider Type Mini Standard Controlle
- Page 15 and 16: Slider Type Mini Standard Controlle
- Page 17 and 18: Slider Type Mini Standard Controlle
- Page 19 and 20: Slider Type Mini Standard Controlle
Dimensions<br />
RCP2W ROBO Cylinder<br />
Slider<br />
Type<br />
For Special Orders P. A-9<br />
Mini<br />
St<strong>and</strong>ard<br />
Note:<br />
Please don't apply an external force<br />
coming from a direction other than<br />
that of the rod's advance.<br />
The rotation stopper may break if a<br />
force coming from right angle or<br />
rotating direction is applied to the rod.<br />
Rod<br />
diameter ø30<br />
9.5 (width across flats)<br />
Intake port*1<br />
(360 deg rotatable)<br />
Cable joint connector *2)<br />
Controllers<br />
Integrated<br />
Rod<br />
Type<br />
Mini<br />
St<strong>and</strong>ard<br />
4-M8 depth 15<br />
Hex Socket Bolt:<br />
4-M5X20<br />
<strong>Actuator</strong> cable*5<br />
Controllers<br />
Integrated<br />
Table/Arm<br />
/Flat Type<br />
A Sec.<br />
Home ME *3<br />
Dimensions of<br />
Supplied Nut<br />
for Rod Tip<br />
Effective T-slot range*4<br />
With Brake<br />
Square nut<br />
insertion inlet<br />
Secure at<br />
least 100<br />
Mini<br />
St<strong>and</strong>ard<br />
Gripper/<br />
Rotary Type<br />
Linear Servo<br />
Type<br />
Details of A Section<br />
Dimensions of Supplied<br />
Square Nut for T-slot<br />
(4 nuts provided)<br />
Brake unit<br />
Cleanroom<br />
Type<br />
<strong>Splash</strong>-<strong>Proof</strong><br />
*1. Intake/exhaust port is the air exhaust tube in the main body. Insert OD ø6 mm<br />
tube <strong>and</strong> use it extended to a place that is not prone to water spills or intake.<br />
*2. Connect motor encoder cable . See page A-39 for details on cables.<br />
The cable joint connector is not splash-proof; therefore, please secure it in a<br />
place that is not prone to water spills.<br />
*3. When homing, the rod moves to the ME; therefore, please watch for any<br />
interference with the surrounding objects.<br />
ME: Mechanical End<br />
SE: Stroke end<br />
The dimensions enclosed in "( )" are reference dimensions.<br />
*4. Please note that there is no T-slot in the bottom of brake unit.<br />
*5. The actuator cable is not a robot cable (flex resistant cable); therefore, please<br />
don't use it for movable parts such as cable track.<br />
Dimensions/Weight by Stroke<br />
Stroke 50 100 150 200 250 300<br />
l<br />
L<br />
Weight (kg)<br />
150<br />
266<br />
3.5<br />
* Adding a brake increases overall length by 72.5mm<br />
<strong>and</strong> its weight by 0.9kg.<br />
200<br />
316<br />
4.0<br />
250<br />
366<br />
4.5<br />
300<br />
416<br />
5.0<br />
350<br />
466<br />
5.5<br />
400<br />
516<br />
6.0<br />
Controllers<br />
PMEC<br />
/AMEC<br />
PSEP<br />
/ASEP<br />
ROBO<br />
NET<br />
ERC2<br />
PCON<br />
2 Compatible Controllers<br />
ACON<br />
The RCP2W series actuators can operate with the controllers below. Select the controller according to your usage.<br />
Max.<br />
External<br />
Input<br />
Name<br />
Model<br />
Description<br />
Positioning<br />
View<br />
Voltage<br />
Points<br />
Power<br />
Supply<br />
Capacity<br />
St<strong>and</strong>ard Price<br />
See Page<br />
SCON<br />
PSEL<br />
PMEC-C-56PI-NP-21<br />
Easy-to-use controller,<br />
even for beginners.<br />
AC100V<br />
AC200V<br />
See P481 − P477<br />
Solenoid Valve Type<br />
PSEP-C-56PI-NP-2-0<br />
Operable with same signal<br />
as solenoid valve. 3 points<br />
−<br />
Supports both single <strong>and</strong><br />
double solenoid <strong>types</strong>.<br />
<strong>Splash</strong>-<strong>Proof</strong><br />
No homing necessary with<br />
Solenoid ValveType PSEP-CW-56PI-NP-2-0<br />
simple absolute type.<br />
−<br />
P487<br />
ASEL<br />
SSEL<br />
XSEL<br />
Positioner Type<br />
Safety Category<br />
Compliant Positioner<br />
Type<br />
Pulse Train Input ype<br />
(Differential Line<br />
Driver)<br />
Pulse Train Input<br />
Type (Open Collector)<br />
PCON-C-56PI-NP-2-0<br />
PCON-CG-56PI-NP-2-0<br />
PCON-PL-56PI-NP-2-0<br />
PCON-PO-56PI-NP-2-0<br />
Positioning possible for<br />
up to 512 points<br />
Differential line driver<br />
support Pulse Train<br />
Input Type<br />
Open Collector Pulse<br />
Train Input Type<br />
512 points<br />
(−)<br />
DC24V<br />
2A max.<br />
−<br />
−<br />
−<br />
−<br />
P525<br />
Pulse Motor<br />
Servo Motor<br />
(24V)<br />
Serial<br />
Communication Type<br />
PCON-SE-56PI-N-0-0<br />
Dedicated to serial<br />
communication<br />
64 points −<br />
Servo Motor<br />
(200V)<br />
Field Network Type<br />
Program Control<br />
Type<br />
RPCON-56P<br />
PSEL-C-1-56PI-NP-2-0<br />
Dedicated to field<br />
network<br />
Programmed operation<br />
is possible Can operate<br />
up to 2 axes<br />
768 points − P503<br />
1500 points − P557<br />
* This is for the single-axis PSEL.<br />
1 is a placeholder for the power supply voltage (1:100V / 2:100~240V)<br />
RCP2W-RA6C 448<br />
Linear<br />
Servo Motor


