The Finite Element Method for the Analysis of Non-Linear and ...
The Finite Element Method for the Analysis of Non-Linear and ...
The Finite Element Method for the Analysis of Non-Linear and ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>The</strong> <strong>Finite</strong> <strong>Element</strong> <strong>Method</strong> <strong>for</strong> <strong>the</strong> <strong>Analysis</strong> <strong>of</strong><br />
<strong>Non</strong>-<strong>Linear</strong> <strong>and</strong> Dynamic Systems<br />
Pr<strong>of</strong>. Dr. Eleni Chatzi<br />
Lecture 1 - 20 September, 2010<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 1
Course In<strong>for</strong>mation<br />
Instructor<br />
Pr<strong>of</strong>. Dr. Eleni Chatzi, email: chatzi@ibk.baug.ethz.ch<br />
Office Hours: HIL E14.3, Wednesday 10:00-12:00 or by email<br />
Assistant<br />
Mohammad Miah, HIL E14.2, email: miah@ibk.baug.ethz.ch<br />
Course Website<br />
Lecture Notes <strong>and</strong> Homeworks will be posted at:<br />
http://www.ibk.ethz.ch/ch/education<br />
Suggested Reading<br />
<strong>Finite</strong> <strong>Element</strong> Procedures by K.J. Ba<strong>the</strong>, Prentice Hall, 1996<br />
<strong>Non</strong>linear <strong>Finite</strong> <strong>Element</strong>s <strong>for</strong> Continua <strong>and</strong> Structures by T.<br />
Belytschko, W. K. Liu, <strong>and</strong> B. Moran, John Wiley <strong>and</strong> Sons, 2000<br />
<strong>The</strong> <strong>Finite</strong> <strong>Element</strong> <strong>Method</strong>: <strong>Linear</strong> Static <strong>and</strong> Dynamic <strong>Finite</strong><br />
<strong>Element</strong> <strong>Analysis</strong> by T. J. R. Hughes, Dover Publications, 2000<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 2
Course Outline<br />
Review <strong>of</strong> <strong>the</strong> <strong>Finite</strong> <strong>Element</strong> method - Introduction to<br />
<strong>Non</strong>-<strong>Linear</strong> <strong>Analysis</strong><br />
<strong>Non</strong>-<strong>Linear</strong> <strong>Finite</strong> <strong>Element</strong>s in solids <strong>and</strong> Structural Mechanics<br />
- Overview <strong>of</strong> Solution <strong>Method</strong>s<br />
- Continuum Mechanics & <strong>Finite</strong> De<strong>for</strong>mations<br />
- Lagrangian Formulation<br />
- Structural <strong>Element</strong>s<br />
Dynamical <strong>Finite</strong> <strong>Element</strong> Calculations<br />
- Integration <strong>Method</strong>s<br />
- Mode Superposition<br />
Eigenvalue Problems<br />
Special Topics<br />
- Extended <strong>Finite</strong> <strong>Element</strong>s, Multigrid <strong>Method</strong>s, Meshless <strong>Method</strong>s<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 3
Grading Policy<br />
Homeworks (60%) - Class Project (40%)<br />
Homework<br />
Project<br />
Homeworks are due in class 2 weeks after assignment<br />
Computer Assignments may be done using any coding language<br />
(MATLAB, Fortran, C, MAPLE) - example code will be provided in<br />
MATLAB<br />
Simulation <strong>of</strong> <strong>the</strong> non-linear behavior <strong>of</strong> a concrete column under<br />
cyclic loading<br />
Students can work in groups <strong>of</strong> two <strong>and</strong> can assist with <strong>the</strong><br />
experimental setup<br />
A final written report by each team will be submitted at <strong>the</strong> end <strong>of</strong><br />
<strong>the</strong> class<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 4
Review <strong>of</strong> <strong>the</strong> <strong>Finite</strong> <strong>Element</strong> <strong>Method</strong> (FEM)<br />
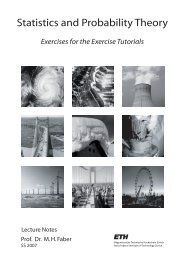
Classification <strong>of</strong> Engineering Systems<br />
Discrete<br />
Continuous<br />
q|y+dy<br />
h 1<br />
q|x<br />
dy<br />
q|x+dx<br />
dx<br />
q|y<br />
h 2<br />
L<br />
Flow<br />
<strong>of</strong> water<br />
Permeable Soil<br />
F = KX<br />
Direct Stiffness <strong>Method</strong><br />
k<br />
( )<br />
∂ 2 φ<br />
∂ 2 x + ∂2 φ<br />
∂ 2 y<br />
Impermeable Rock<br />
Laplace Equation<br />
= 0<br />
FEM: Numerical Technique <strong>for</strong> solution <strong>of</strong> continuous systems.<br />
We will use a displacement based <strong>for</strong>mulation <strong>and</strong> a stiffness based solution<br />
(direct stiffness method).<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 5
Review <strong>of</strong> <strong>the</strong> <strong>Finite</strong> <strong>Element</strong> <strong>Method</strong> (FEM)<br />
Differential Formulation (Strong Form)<br />
Obtained through equilibrium <strong>and</strong> Constitutive Requirements<br />
Governing Differential Equation ex: general 2nd order PDE<br />
A(x, y) ∂2 u<br />
∂ 2 x + 2B(x, y) ∂2 u<br />
∂x∂y + C(x, u<br />
y)∂2 ∂ 2 y<br />
= φ(x, y, u,<br />
∂u<br />
∂y , ∂u<br />
∂y )<br />
Problem Classification<br />
B 2 − AC < 0 ⇒ elliptic<br />
B 2 − AC = 0 ⇒<br />
parabolic<br />
B 2 − AC > 0 ⇒<br />
hyperbolic<br />
Boundary Condition Classification<br />
Essential (Dirichlet): u(x 0 , y 0 ) = u 0<br />
order m − 1 at most <strong>for</strong> C m−1<br />
Natural (Neumann): ∂u<br />
∂y (x 0, y 0 ) = ˙u 0<br />
order m to 2m − 1 <strong>for</strong> C m−1<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 6
Strong Form - 1D FEM<br />
Consider <strong>the</strong> following 1D strong <strong>for</strong>m<br />
d<br />
dx (c(x)du dx ) + f(x) = 0<br />
− c(0) d dx u(0) = h<br />
u(L) = 0<br />
(Neumann BC)<br />
(Dirichlet BC)<br />
Physical Problem (1D) Diff. Equation Quantities<br />
One dimensional Heat<br />
flow<br />
Axially Loaded Bar<br />
d dT<br />
Ak<br />
dx dx + Q = 0<br />
d du<br />
AE<br />
dx dx + b = 0<br />
T=temperature<br />
A=area<br />
k=<strong>the</strong>rmal<br />
conductivity<br />
Q=heat supply<br />
u=displacement<br />
A=area<br />
E=Young’s<br />
modulus<br />
B=axial loading<br />
Constitutive<br />
Law<br />
Fourier<br />
q = −k dT/dx<br />
q = heat flux<br />
Hooke<br />
σ = Edu/dx<br />
σ = stress<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 7
Weak Form - 1D FEM<br />
From Strong Form to Weak <strong>for</strong>m - Approach #1<br />
Principle <strong>of</strong> Virtual Work:<br />
For any compatible small virtual displacements imposed on <strong>the</strong> body in its<br />
state <strong>of</strong> equilibrium, <strong>the</strong> total internal virtual work is equal to <strong>the</strong> total<br />
external virtual work.<br />
∫<br />
W int =<br />
where<br />
Ω<br />
∫<br />
¯ɛ T τ dΩ = W ext =<br />
Ω<br />
∫<br />
ū T bdΩ + ū ST T S dΓ + ∑<br />
Γ<br />
i<br />
ū iT R C<br />
i<br />
T S : surface traction (along boundary Γ)<br />
b: body <strong>for</strong>ce per unit area<br />
R C : nodal loads<br />
ū: virtual displacement<br />
¯ɛ: virtual strain<br />
τ : stresses<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 8
Weak Form - 1D FEM<br />
From Strong Form to Weak <strong>for</strong>m - Approach #2<br />
Principle <strong>of</strong> Minimum Potential Energy:<br />
Applies to elastic problems where since <strong>the</strong> elasticity matrix is positive<br />
definite, hence <strong>the</strong> energy functional Π has a minimum (stable equilibrium).<br />
Approach #1 applies in general.<br />
<strong>The</strong> potential energy Π is defined as <strong>the</strong> strain energy U minus <strong>the</strong> work <strong>of</strong><br />
<strong>the</strong> external loads W<br />
Π = U − W<br />
U = 1 ∫<br />
ɛ T CɛdΩ<br />
2 Ω<br />
∫<br />
∫<br />
W = ū T bdΩ + ū ST T s dΓ T + ∑<br />
Ω<br />
Γ T i<br />
ū T i R C<br />
i<br />
(b T s , R C as defined previously)<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 9
Weak Form - 1D FEM<br />
3. Derive Weak <strong>for</strong>m from Strong <strong>for</strong>m<br />
Given an arbitrary weight function w, where<br />
S = {u|u ∈ C 0 , u(l) = 0}, S 0 = {w|w ∈ C 0 , w(l) = 0}<br />
C 0 is <strong>the</strong> collection <strong>of</strong> all continuous functions.<br />
Multiplying by w <strong>and</strong> integrating over Ω<br />
∫ l<br />
0<br />
w(x)[(c(x)u ′ (x)) ′ + f (x)]dx = 0<br />
[w(0)(c(0)u ′ (0) + h] = 0<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 10
Weak Form - 1D FEM<br />
Using <strong>the</strong> divergence <strong>the</strong>orem (integration by parts) we reduce <strong>the</strong><br />
order <strong>of</strong> <strong>the</strong> differential:<br />
∫ l<br />
0<br />
∫ l<br />
wg ′ dx = [wg] l 0 − gw ′ dx<br />
0<br />
<strong>The</strong> weak <strong>for</strong>m is <strong>the</strong>n written<br />
Find u(x) ∈ S such that :<br />
∫ l<br />
0<br />
wcu ′ dx =<br />
∫ l<br />
0<br />
wfdx + w(0)h<br />
S = {u|u ∈ C 0 , u(l) = 0}<br />
S 0 = {w|w ∈ C 0 , w(l) = 0}<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 11
FE <strong>for</strong>mulation: Discretization<br />
Divide <strong>the</strong> body into finite elements, e, connected to each o<strong>the</strong>r<br />
through nodes<br />
e<br />
x 1<br />
e<br />
x 2<br />
e<br />
Replace <strong>the</strong> integral as sum over <strong>the</strong> elements:<br />
[<br />
∑ ∫ x e ∫ ]<br />
2<br />
x e<br />
w ′ cu ′ 2<br />
dx − wfdx − w(0)h = 0<br />
x1<br />
e x1<br />
e<br />
e<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 12
1D FE <strong>for</strong>mulation: Galerkin’s <strong>Method</strong><br />
Galerkin’s method assumes that <strong>the</strong> approximate solution, u, can be<br />
expressed as<br />
u(x) ≈ u h (x) = ∑ i<br />
N i (x)u i = N(x)u<br />
<strong>The</strong> weighting function, w is chosen to be <strong>of</strong> <strong>the</strong> same <strong>for</strong>m as u<br />
w(x) ≈ w h (x) = ∑ i<br />
N i (x)w i = N(w)w<br />
N = [N 1 N 2 ] u = [u 1 u 2 ] T w = [w 1 w 2 ] T (<strong>for</strong> 2 nodes)<br />
Shape function Properties:<br />
Bounded <strong>and</strong> Continuous<br />
One <strong>for</strong> each node<br />
Ni e(x j e) = δ ij, where<br />
{<br />
1 if i = j<br />
δ ij =<br />
0 if i ≠ j<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 13
1D FE <strong>for</strong>mulation: Galerkin’s <strong>Method</strong><br />
Substituting into <strong>the</strong> weak <strong>for</strong>mulation <strong>and</strong> rearranging terms, we<br />
finally obtain <strong>the</strong> following discrete system:<br />
Ku = f<br />
K = A e K e −→ K e =<br />
∫ x e<br />
2<br />
x1<br />
e<br />
N Ț xcN ,x dx =<br />
∫ x e<br />
2<br />
x1<br />
e<br />
B T cBdx<br />
f = A e f e −→ f e =<br />
∫ x e<br />
2<br />
x e 1<br />
N T fdx + N T h| x=0<br />
where A is not a sum but an assembly <strong>and</strong> , x denotes differentiation<br />
with respect to x<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 14
1D FE <strong>for</strong>mulation: Iso-Parametric Formulation<br />
Iso-Parametric Mapping<br />
x<br />
x 1<br />
e<br />
x 2<br />
e<br />
−1 1<br />
ξ<br />
Shape Functions in Natural Coordinates<br />
x(ξ) = ∑<br />
N i (ξ)xi e = N 1 (ξ)x1 e + N 2 (ξ)x2<br />
e<br />
i=1,2<br />
N 1 (ξ) = 1 2 (1 − ξ), N 2(ξ) = 1 (1 + ξ)<br />
2<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 15
1D FE <strong>for</strong>mulation: Iso-Parametric Formulation<br />
Map <strong>the</strong> integrals to <strong>the</strong> natural domain −→ element stiffness matrix:<br />
K e =<br />
∫ x<br />
e<br />
2<br />
x e 1<br />
N Ț xcN ,xdx =<br />
where N ,ξ = d dξ<br />
∫ 1<br />
−1<br />
<strong>and</strong> x ,ξ = dx<br />
dξ = x 2 e − x1<br />
e<br />
2<br />
(N ,ξ ξ ,x) T c(N ,ξ ξ ,x)x ,ξ dξ<br />
[ 1<br />
]<br />
(1 − ξ)<br />
2<br />
1<br />
(1 + ξ) 2<br />
=<br />
[ −1<br />
2<br />
1<br />
2<br />
]<br />
= h 2 = J (Jacobian)<br />
ξ ,x = dξ<br />
dx = J−1 = 2/h<br />
From all <strong>the</strong> above,<br />
[ ]<br />
K e c 1 −1<br />
=<br />
x2 e − x 1<br />
e −1 1<br />
Similary, we obtain <strong>the</strong> element load vector:<br />
f e =<br />
∫ x<br />
e<br />
2<br />
x e 1<br />
N T fdx + N T h| x=0 =<br />
∫ 1<br />
−1<br />
N T (ξ)fx ,ξ dξ + N T (x)h| x=0<br />
Note: <strong>the</strong> iso-parametric mapping is only done <strong>for</strong> <strong>the</strong> integral.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 16
Strong Form - 2D <strong>Linear</strong> Elasticity FEM<br />
Governing Equations<br />
Equilibrium Eq: ∇ s σ + b = 0 ∈ Ω<br />
Kinematic Eq: ɛ = ∇ s u ∈ Ω<br />
Constitutive Eq: σ = D · ɛ ∈ Ω<br />
Traction B.C.: τ · n = T s ∈ Γ t<br />
Displacement B.C: u = u Γ ∈ Γ u<br />
Hooke’s Law - Constitutive Equation<br />
Plane Stress<br />
Plane Strain<br />
τ zz = τ xz = τ yz = 0, ɛ zz ≠ 0 ɛ zz = γ xz = γ yz = 0, σ zz ≠ 0<br />
⎡<br />
⎤<br />
⎡<br />
D =<br />
E 1 ν 0<br />
1 − ν ν 0<br />
⎣ ν 1 0 ⎦<br />
E<br />
D =<br />
⎣ ν 1 − ν 0<br />
1 − ν 2 (1 − ν)(1 + ν)<br />
0 0<br />
0 0<br />
1−ν<br />
2<br />
1−2ν<br />
2<br />
⎤<br />
⎦<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 17
2D FE <strong>for</strong>mulation: Discretization<br />
Divide <strong>the</strong> body into finite elements connected to each o<strong>the</strong>r through<br />
nodes<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 18
2D FE <strong>for</strong>mulation: Iso-Parametric Formulation<br />
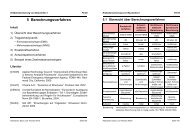
Shape Functions in Natural Coordinates<br />
N 1 (ξ, η) = 1 4 (1 − ξ)(1 − η), N 2(ξ, η) = 1 (1 + ξ)(1 − η)<br />
4<br />
N 3 (ξ, η) = 1 4 (1 + ξ)(1 + η), N 4(ξ, η) = 1 (1 − ξ)(1 + η)<br />
4<br />
Iso-parametric Mapping<br />
x =<br />
y =<br />
4∑<br />
N i (ξ, η)xi<br />
e<br />
i=1<br />
4∑<br />
i=1<br />
N i (ξ, η)y e<br />
i<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 19
Bilinear Shape Functions<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 20
Appendix - Axially Loaded Bar Example<br />
Constant End Load<br />
Given: Length L, Section Area A, Young’s modulus E<br />
Find: stresses <strong>and</strong> de<strong>for</strong>mations.<br />
Assumptions:<br />
<strong>The</strong> cross-section <strong>of</strong> <strong>the</strong> bar does not change after loading.<br />
<strong>The</strong> material is linear elastic, isotropic, <strong>and</strong> homogeneous.<br />
<strong>The</strong> load is centric.<br />
End-effects are not <strong>of</strong> interest to us.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 22
Appendix - Axially Loaded Bar Example<br />
Strength <strong>of</strong> Materials Approach<br />
From equilibrium equation, axial <strong>for</strong>ce at r<strong>and</strong>om point x along <strong>the</strong><br />
bar is:<br />
f(x) = R(= const) ⇒ σ(x) = R A<br />
From constitutive equation (Hooke’s Law):<br />
ɛ(x) = σ(x)<br />
E<br />
Hence, <strong>the</strong> de<strong>for</strong>mation is obtained as:<br />
= R<br />
AE<br />
δ(x) = ɛ(x)<br />
x<br />
⇒ δ(x) = Rx<br />
AE<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 23
Appendix - Axially Loaded Bar Example<br />
<strong>Linear</strong>ly Distributed Axial Load<br />
From equilibrium equation, axial <strong>for</strong>ce at r<strong>and</strong>om point x along <strong>the</strong><br />
bar is:<br />
f(x) = R + a(L2 − x 2 )<br />
( depends on x)<br />
2<br />
In order to now find stresses, de<strong>for</strong>mations we have to repeat <strong>the</strong><br />
process <strong>for</strong> every point in <strong>the</strong> bar (computationally inefficient).<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 24
Appendix - Axially Loaded Bar Example<br />
From equilibrium equation, <strong>for</strong> <strong>the</strong> infinitesimal element:<br />
∆σ<br />
dσ<br />
Aσ = q(x)∆x + A(σ + ∆σ) ⇒ A }{{}<br />
lim + q(x) = 0 ⇒ A<br />
∆x dx + q(x) = 0<br />
∆x→0<br />
Also, ɛ = du<br />
dx , ɛ = Eɛ, q(x) = ax ⇒ AE d 2 u<br />
dx 2 + ax = 0<br />
Strong Form<br />
AE d 2 u<br />
dx + ax = 0<br />
2<br />
u(0) = 0 essential BC<br />
f(L) = R ⇒ AE du<br />
dx ∣ = R natural BC<br />
x=L<br />
Analytical Solution<br />
u(x) = u hom + u p ⇒ u(x) = C 1x + C 2 − ax 3<br />
6AE<br />
C 1, C 2 are determined from <strong>the</strong> BC<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 25
Appendix - Axially Loaded Bar Example<br />
An analytical solution cannot always be found<br />
Approximate Solution - <strong>The</strong> Galerkin Approach: Multiply by <strong>the</strong> weight function w <strong>and</strong><br />
integrate over <strong>the</strong> domain<br />
Apply integration by parts<br />
∫ L<br />
0<br />
∫ L<br />
0<br />
[<br />
AE d2 u<br />
dx 2 wdx = AE du ] l<br />
dx w −<br />
0<br />
AE d2 u<br />
dx 2 wdx = [<br />
∫ L<br />
∫<br />
AE d2 u<br />
L<br />
0 dx 2 wdx + axwdx = 0<br />
0<br />
AE du<br />
dx<br />
∫ L<br />
0<br />
AE du dw<br />
dx dx dx ⇒<br />
(L)w(L) − AE<br />
du<br />
dx (0)w(0) ]<br />
−<br />
∫ L<br />
0<br />
AE du dw<br />
dx dx dx<br />
But from BC we have u(0) = 0, AE du (L)w(L) = Rw(L), <strong>the</strong>re<strong>for</strong>e <strong>the</strong> approximate<br />
dx<br />
weak <strong>for</strong>m can be written as<br />
∫ L<br />
AE du<br />
∫<br />
dw<br />
L<br />
0 dx dx dx = Rw(L) + axwdx<br />
0<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 26
Appendix - Axially Loaded Bar Example<br />
In Galerkin’s method we assume that <strong>the</strong> approximate solution, u can be expressed as<br />
u(x) =<br />
n∑<br />
u j N j (x)<br />
w is chosen to be <strong>of</strong> <strong>the</strong> same <strong>for</strong>m as <strong>the</strong> approximate solution (but with arbitrary<br />
coefficients w i ),<br />
w(x) =<br />
j=1<br />
n∑<br />
w i N i (x)<br />
i=1<br />
Plug u(x),w(x) into <strong>the</strong> approximate weak <strong>for</strong>m:<br />
∫ L n∑ dN j (x)<br />
AE u j<br />
0<br />
dx<br />
j=1<br />
n∑<br />
i=1<br />
w i<br />
dN i (x)<br />
dx<br />
w i is arbitrary, so <strong>the</strong> above has to hold ∀ w i :<br />
n∑<br />
∫ L n∑<br />
dx = R w i N i (L) + ax w i N i (x)dx<br />
i=1<br />
0<br />
i=1<br />
n∑<br />
[∫ L dN j (x)<br />
AE dN ]<br />
∫<br />
i (x)<br />
L<br />
dx u j = RN i (L) + axN i (x)dx<br />
j=1<br />
0 dx dx<br />
0<br />
i = 1 . . . n<br />
which is a system <strong>of</strong> n equations that can be solved <strong>for</strong> <strong>the</strong> unknown coefficients u j .<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 27
Appendix - Axially Loaded Bar Example<br />
<strong>The</strong> matrix <strong>for</strong>m <strong>of</strong> <strong>the</strong> previous system can be expressed as<br />
K ij u j = f i where K ij =<br />
<strong>and</strong> f i = RN i (L) +<br />
∫ L<br />
0<br />
∫ L<br />
0<br />
dN j (x)<br />
dx<br />
axN i (x)dx<br />
AE dN i(x)<br />
dx<br />
dx<br />
<strong>Finite</strong> <strong>Element</strong> Solution - using 2 discrete elements, <strong>of</strong> length h (3 nodes)<br />
From <strong>the</strong>[ iso-parametric ] <strong>for</strong>mulation we know <strong>the</strong> element stiffness matrix<br />
1 −1<br />
K e = AE . Assembling <strong>the</strong> element stiffness matrices we get:<br />
h −1 1<br />
⎡<br />
K tot = ⎣<br />
K11 e K12 1 0<br />
K12 1 K22 1 + K11 2 K12<br />
2<br />
0 K12 2 K22<br />
2<br />
⎤<br />
⎦ ⇒<br />
K tot = AE h<br />
⎡<br />
⎣<br />
1 −1 0<br />
−1 2 −1<br />
0 −1 1<br />
⎤<br />
⎦<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 28