Etudes et évaluation de processus océaniques par des hiérarchies ...
Etudes et évaluation de processus océaniques par des hiérarchies ... Etudes et évaluation de processus océaniques par des hiérarchies ...
154 CHAPITRE 4. ETUDES DE PROCESSUS OCÉANOGRAPHIQUES 10 Another important point is, that the parameter values are supposed to be constant in time. The values of the friction parameters are clearly non-negative, so every time the assimilation scheme provides a negative value of one of these parameters, which is possible due to the linearity of the analysis step and the statistical nature of the EnKF, the value is put to zero. All pseudo-random-numbers were generated by a “Mersenne Twister” (Matsumoto & Nishimura 1998). 4 Experiments tel-00545911, version 1 - 13 Dec 2010 The goal of our data assimilation experiment is to determine the friction laws acting on the vein of a gravity current, linear versus quadratic, and the corresponding friction parameters, by only observing the vertical extension (h) of the gravity current. The vertical extension, that is the density structure of a gravity current is the variable that is easiest to measure and to observe in the ocean and in laboratory experiments. Velocities, even their average values are hard to determine as they are highly variable in space and intermittent in time. The thickness h is extracted from the runs of the Navier-Stokes model, it is determined by the position above ground of the thermocline that corresponds to half the initial maximum temperature anomaly in the gravity current at the assimilation points x, every 1km, and the assimilation times t, every hour. It is the time series of these shapes h(x, t), and only these, which are provided to the assimilation run to determine the friction parameters. Please note that the space integral of h, the total volume, is not conserved but has some slight variation due to mixing, entrainment and detrainment, whereas in the shallow water model without assimilation it is conserved. The data assimilation procedure corrects the total state vector, including the h-value and the method can thus deal consistently with variations in the total gravity current fluid volume (or area in our 2.5D case). A series of seven experiments was performed. The density anomaly ∆T is the only parameter varied between the experiments. A list of all experiment performed, the duration of the experiment, the average geostrophic velocity ¯v g and the Reynolds number, Re Ek = vgδ = ∆T · 2 · 10−4 K −1 g tan(α) √ 2 p = ∆T · 1.5 · 10 3 K −1 , (15) ν v f 3 ν based on the Ekman layer thickness, given by δ = p 2ν/f, are shown in table 1. The Reynolds number based on the Ekman layer thickness, is the determining parameter for laminar flow. When vertical velocities develop (absent in the homogeneous linear Ekman layer), the now turbulent Ekman layer increases in thickness and the actual Reynolds number is larger than calculated by eq. (15) and given in table 1. Results shown in the next section show that vertical velocities become significant for temperature anomalies of about one Kelvin. When vertical velocities are important the flow is characterised by the surface Rossby number, √ Ro = vg = vgu∗ cD vg 2 = , (16) fz 0 fν v fν v where z 0 is the roughness length, which for smooth surfaces is given by z 0 = ν v/u ∗. The friction velocity u ∗ = √ c D v g and the surface Rossby number are results of our
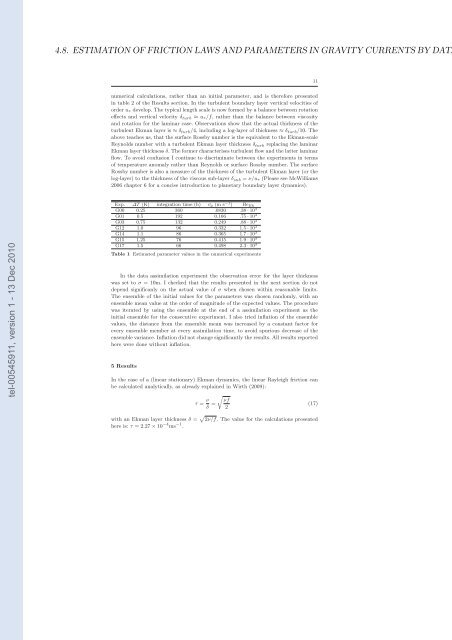
4.8. ESTIMATION OF FRICTION LAWS AND PARAMETERS IN GRAVITY CURRENTS BY DATA 11 numerical calculations, rather than an initial parameter, and is therefore presented in table 2 of the Results section. In the turbulent boundary layer vertical velocities of order u ∗ develop. The typical length scale is now formed by a balance between rotation effects and vertical velocity δ turb ≈ u ∗/f, rather than the balance between viscosity and rotation for the laminar case. Observations show that the actual thickness of the turbulent Ekman layer is ≈ δ turb /4, including a log-layer of thickness ≈ δ turb /10. The above teaches us, that the surface Rossby number is the equivalent to the Ekman-scale Reynolds number with a turbulent Ekman layer thickness δ turb replacing the laminar Ekman layer thickness δ. The former characterises turbulent flow and the latter laminar flow. To avoid confusion I continue to discriminate between the experiments in terms of temperature anomaly rather than Reynolds or surface Rossby number. The surface Rossby number is also a measure of the thickness of the turbulent Ekman layer (or the log-layer) to the thickness of the viscous sub-layer δ sub = ν/u ∗ (Please see McWilliams 2006 chapter 6 for a concise introduction to planetary boundary layer dynamics). tel-00545911, version 1 - 13 Dec 2010 Exp. ∆T (K) integration time (h) ¯v g (m s −1 ) Re Ek G00 0.25 360 .0830 .38 · 10 3 G01 0.5 192 0.166 .75 · 10 3 G03 0.75 132 0.249 .88 · 10 3 G12 1.0 96 0.332 1.5 · 10 3 G14 1.1 86 0.365 1.7 · 10 3 G15 1.25 76 0.415 1.9 · 10 3 G17 1.5 66 0.498 2.3 · 10 3 Table 1 Estimated parameter values in the numerical experiments In the data assimilation experiment the observation error for the layer thickness was set to σ = 10m. I checked that the results presented in the next section do not depend significanly on the actual value of σ when chosen within reasonable limits. The ensemble of the initial values for the parameters was chosen randomly, with an ensemble mean value at the order of magnitude of the expected values. The procedure was iterated by using the ensemble at the end of a assimilation experiment as the initial ensemble for the consecutive experiment. I also tried inflation of the ensemble values, the distance from the ensemble mean was increased by a constant factor for every ensemble member at every assimilation time, to avoid spurious decrease of the ensemble variance. Inflation did not change significantly the results. All results reported here were done without inflation. 5 Results In the case of a (linear stationary) Ekman dynamics, the linear Rayleigh friction can be calculated analytically, as already explained in Wirth (2009): τ = ν δ = r νf 2 (17) with an Ekman layer thickness δ = p 2ν/f. The value for the calculations presented here is: τ = 2.27 × 10 −4 ms −1 .
- Page 109 and 110: 4.5. MEAN CIRCULATION AND STRUCTURE
- Page 111 and 112: 4.5. MEAN CIRCULATION AND STRUCTURE
- Page 113 and 114: 4.5. MEAN CIRCULATION AND STRUCTURE
- Page 115 and 116: 4.5. MEAN CIRCULATION AND STRUCTURE
- Page 117 and 118: 4.5. MEAN CIRCULATION AND STRUCTURE
- Page 119 and 120: 4.5. MEAN CIRCULATION AND STRUCTURE
- Page 121 and 122: 4.5. MEAN CIRCULATION AND STRUCTURE
- Page 123 and 124: 4.5. MEAN CIRCULATION AND STRUCTURE
- Page 125 and 126: 4.6. ESTIMATION OF FRICTION PARAMET
- Page 127 and 128: 4.6. ESTIMATION OF FRICTION PARAMET
- Page 129 and 130: 4.6. ESTIMATION OF FRICTION PARAMET
- Page 131 and 132: 4.6. ESTIMATION OF FRICTION PARAMET
- Page 133 and 134: 4.6. ESTIMATION OF FRICTION PARAMET
- Page 135 and 136: 4.6. ESTIMATION OF FRICTION PARAMET
- Page 137 and 138: 4.7. ON THE BASIC STRUCTURE OF OCEA
- Page 139 and 140: 4.7. ON THE BASIC STRUCTURE OF OCEA
- Page 141 and 142: 4.7. ON THE BASIC STRUCTURE OF OCEA
- Page 143 and 144: 4.7. ON THE BASIC STRUCTURE OF OCEA
- Page 145 and 146: 4.7. ON THE BASIC STRUCTURE OF OCEA
- Page 147 and 148: 4.7. ON THE BASIC STRUCTURE OF OCEA
- Page 149 and 150: 4.7. ON THE BASIC STRUCTURE OF OCEA
- Page 151 and 152: 4.8. ESTIMATION OF FRICTION LAWS AN
- Page 153 and 154: 4.8. ESTIMATION OF FRICTION LAWS AN
- Page 155 and 156: 4.8. ESTIMATION OF FRICTION LAWS AN
- Page 157 and 158: 4.8. ESTIMATION OF FRICTION LAWS AN
- Page 159: 4.8. ESTIMATION OF FRICTION LAWS AN
- Page 163 and 164: 4.8. ESTIMATION OF FRICTION LAWS AN
- Page 165 and 166: 4.8. ESTIMATION OF FRICTION LAWS AN
- Page 167 and 168: 4.9. ON THE NUMERICAL RESOLUTION OF
- Page 169 and 170: 4.9. ON THE NUMERICAL RESOLUTION OF
- Page 171 and 172: 4.9. ON THE NUMERICAL RESOLUTION OF
- Page 173 and 174: 4.9. ON THE NUMERICAL RESOLUTION OF
- Page 175 and 176: 4.9. ON THE NUMERICAL RESOLUTION OF
- Page 177 and 178: 4.9. ON THE NUMERICAL RESOLUTION OF
- Page 179 and 180: Quatrième partie tel-00545911, ver
- Page 181 and 182: 175 tel-00545911, version 1 - 13 De
- Page 183 and 184: 177 Contents 1 Preface 5 tel-005459
- Page 185 and 186: 179 Chapter 1 Preface tel-00545911,
- Page 187 and 188: 181 Chapter 2 Observing the Ocean t
- Page 189 and 190: 183 Chapter 3 Physical properties o
- Page 191 and 192: 185 3.3. θ-S DIAGRAMS 11 3.3 θ-S
- Page 193 and 194: 187 3.6. HEAT CAPACITY 13 tel-00545
- Page 195 and 196: 189 3.7. CONSERVATIVE PROPERTIES 15
- Page 197 and 198: 191 Chapter 4 Surface fluxes, the f
- Page 199 and 200: 193 4.2. FRESH WATER FLUX 19 water.
- Page 201 and 202: 195 Chapter 5 Dynamics of the Ocean
- Page 203 and 204: 197 5.2. THE LINEARIZED ONE DIMENSI
- Page 205 and 206: 199 5.4. TWO DIMENSIONAL STATIONARY
- Page 207 and 208: 201 5.6. THE CORIOLIS FORCE 27 Whic
- Page 209 and 210: 203 5.8. GEOSTROPHIC EQUILIBRIUM 29
4.8. ESTIMATION OF FRICTION LAWS AND PARAMETERS IN GRAVITY CURRENTS BY DATA<br />
11<br />
numerical calculations, rather than an initial <strong>par</strong>am<strong>et</strong>er, and is therefore presented<br />
in table 2 of the Results section. In the turbulent boundary layer vertical velocities of<br />
or<strong>de</strong>r u ∗ <strong>de</strong>velop. The typical length scale is now formed by a balance b<strong>et</strong>ween rotation<br />
effects and vertical velocity δ turb ≈ u ∗/f, rather than the balance b<strong>et</strong>ween viscosity<br />
and rotation for the laminar case. Observations show that the actual thickness of the<br />
turbulent Ekman layer is ≈ δ turb /4, including a log-layer of thickness ≈ δ turb /10. The<br />
above teaches us, that the surface Rossby number is the equivalent to the Ekman-scale<br />
Reynolds number with a turbulent Ekman layer thickness δ turb replacing the laminar<br />
Ekman layer thickness δ. The former characterises turbulent flow and the latter laminar<br />
flow. To avoid confusion I continue to discriminate b<strong>et</strong>ween the experiments in terms<br />
of temperature anomaly rather than Reynolds or surface Rossby number. The surface<br />
Rossby number is also a measure of the thickness of the turbulent Ekman layer (or the<br />
log-layer) to the thickness of the viscous sub-layer δ sub = ν/u ∗ (Please see McWilliams<br />
2006 chapter 6 for a concise introduction to plan<strong>et</strong>ary boundary layer dynamics).<br />
tel-00545911, version 1 - 13 Dec 2010<br />
Exp. ∆T (K) integration time (h) ¯v g (m s −1 ) Re Ek<br />
G00 0.25 360 .0830 .38 · 10 3<br />
G01 0.5 192 0.166 .75 · 10 3<br />
G03 0.75 132 0.249 .88 · 10 3<br />
G12 1.0 96 0.332 1.5 · 10 3<br />
G14 1.1 86 0.365 1.7 · 10 3<br />
G15 1.25 76 0.415 1.9 · 10 3<br />
G17 1.5 66 0.498 2.3 · 10 3<br />
Table 1 Estimated <strong>par</strong>am<strong>et</strong>er values in the numerical experiments<br />
In the data assimilation experiment the observation error for the layer thickness<br />
was s<strong>et</strong> to σ = 10m. I checked that the results presented in the next section do not<br />
<strong>de</strong>pend significanly on the actual value of σ when chosen within reasonable limits.<br />
The ensemble of the initial values for the <strong>par</strong>am<strong>et</strong>ers was chosen randomly, with an<br />
ensemble mean value at the or<strong>de</strong>r of magnitu<strong>de</strong> of the expected values. The procedure<br />
was iterated by using the ensemble at the end of a assimilation experiment as the<br />
initial ensemble for the consecutive experiment. I also tried inflation of the ensemble<br />
values, the distance from the ensemble mean was increased by a constant factor for<br />
every ensemble member at every assimilation time, to avoid spurious <strong>de</strong>crease of the<br />
ensemble variance. Inflation did not change significantly the results. All results reported<br />
here were done without inflation.<br />
5 Results<br />
In the case of a (linear stationary) Ekman dynamics, the linear Rayleigh friction can<br />
be calculated analytically, as already explained in Wirth (2009):<br />
τ = ν δ = r<br />
νf<br />
2<br />
(17)<br />
with an Ekman layer thickness δ = p 2ν/f. The value for the calculations presented<br />
here is: τ = 2.27 × 10 −4 ms −1 .


