The Finite Element Method for the Analysis of Non-Linear and ...
The Finite Element Method for the Analysis of Non-Linear and ...
The Finite Element Method for the Analysis of Non-Linear and ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>The</strong> <strong>Finite</strong> <strong>Element</strong> <strong>Method</strong> <strong>for</strong> <strong>the</strong> <strong>Analysis</strong> <strong>of</strong><br />
<strong>Non</strong>-<strong>Linear</strong> <strong>and</strong> Dynamic Systems<br />
Pr<strong>of</strong>. Dr. Eleni Chatzi<br />
Lecture 10 - 4 December, 2012<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 1
<strong>Non</strong>linear Dynamic <strong>Analysis</strong><br />
Example Case<br />
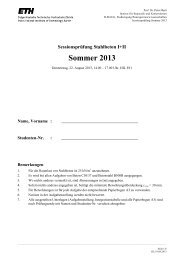
Dynamic Shake Table Test <strong>of</strong> a Rein<strong>for</strong>ced Concrete Column<br />
Damper<br />
Specimen<br />
250 1285<br />
1535<br />
Servo hydraulic test cylinder<br />
Piston: + / - 125 mm<br />
Piston <strong>for</strong>ce: + / - 100 kN<br />
Anchorage<br />
ETH ShakeTable<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 2
Example Case<br />
Elevation Drawings<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 3
Example Case<br />
Plan Drawings<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 4
Expected Behavior<br />
RC Response in Cyclic Loading<br />
Experimental Data<br />
Accelerometer Measurements<br />
Displacement Measurements<br />
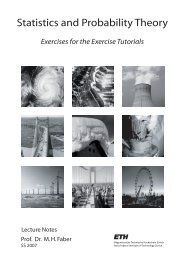
RC Response Characteristics<br />
Strength Deterioration<br />
Stiffness Degradation<br />
Pinching Behavior<br />
6. Force–displacement relationships observed in static cyclic tests (RF—failure <strong>of</strong> vertical rein<strong>for</strong>cement, DC—diagonal cracking,<br />
pression failure).<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 5
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior<br />
Concrete Material Models<br />
-σ<br />
σcu<br />
peak compressive stress<br />
E0<br />
Compression<br />
s<strong>of</strong>tening<br />
+ε<br />
strain at maximum stress<br />
-ε<br />
εo εcu<br />
Tension<br />
σtu = maximum tensile strength <strong>of</strong> concrete<br />
+σ<br />
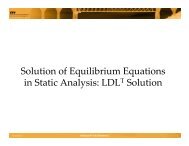
Figure 2.5: Typical uniaxial compressive <strong>and</strong> tensile stress-strain curve <strong>for</strong> concrete (Bangash 1989)<br />
Typical uniaxial compressive <strong>and</strong> tensile<br />
stress-strain curve <strong>for</strong> concrete<br />
ompression, <strong>the</strong> stress-strain curve <strong>for</strong> concrete is linearly elastic up to about 30 percent <strong>of</strong><br />
maximum compressive strength. Above this point, <strong>the</strong> stress increases gradually up to <strong>the</strong><br />
ximum compressive strength. After it reaches <strong>the</strong> maximum compressive strength σ cu<br />
, <strong>the</strong><br />
ve descends into a s<strong>of</strong>tening region, <strong>and</strong> eventually crushing failure occurs at an ultimate<br />
in ε cu<br />
. In tension, <strong>the</strong> stress-strain curve <strong>for</strong> concrete is approximately linearly elastic up to<br />
maximum tensile strength. After this point, <strong>the</strong> concrete cracks <strong>and</strong> <strong>the</strong> strength decreases<br />
dually to zero (Bangash 1989).<br />
2.3.1.1 FEM Input Data<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 6
Modeling <strong>of</strong> Rein<strong>for</strong>ced 2. DISCRETE VS Concrete SMEARED CRACK Behavior<br />
MODELS<br />
2.1. <strong>The</strong> discrete crack approach<br />
Failure Criteria <strong>for</strong> Concrete<br />
<strong>The</strong> discrete crack approach to concrete fracture is intuitively appealing: a crack is introduced as<br />
a geometric entity. Initially, this was implemented by letting a crack grow when <strong>the</strong> nodal <strong>for</strong>ce<br />
at <strong>the</strong> node ahead <strong>of</strong> <strong>the</strong> crack tip exceeded a tensile strength criterion. <strong>The</strong>n, <strong>the</strong> node is split<br />
<strong>The</strong> determination into two nodes <strong>and</strong> <strong>of</strong><strong>the</strong> failure tip <strong>of</strong> <strong>the</strong> criteria crack is assumed is very to propagate important to <strong>the</strong> next <strong>for</strong>node. <strong>the</strong>When proper <strong>the</strong><br />
tensile strength criterion is violated at this node, it is split <strong>and</strong> <strong>the</strong> procedure is repeated, as<br />
simulation<br />
sketched<br />
<strong>of</strong> <strong>the</strong><br />
in Figure<br />
degrading<br />
1 [1].<br />
behavior <strong>of</strong> concrete structures.<br />
A. Discrete<strong>The</strong>Cracking<br />
discrete crack approach in its original <strong>for</strong>m has several disadvantages. Cracks are <strong>for</strong>ced<br />
to propagate along element boundaries, so that a mesh bias is introduced. Automatic remeshing<br />
<strong>The</strong> discrete allowscrack <strong>the</strong> mesh approach bias to be reduced, to concrete if not eliminated, fracture <strong>and</strong> sophisticated is intuitively computer appealing: codes with a crack<br />
is introduced remeshing as awere geometric developed by entity. IngraffeaInitially, <strong>and</strong> co-workers this [3]. was Never<strong>the</strong>less, implemented a computational by letting a<br />
difficulty, namely, <strong>the</strong> continuous change in topology, is inherent in <strong>the</strong> discrete crack approach<br />
crack grow<strong>and</strong>when is to a certain <strong>the</strong> nodal extent even <strong>for</strong>ce aggravated at <strong>the</strong> by remeshing node ahead procedures. <strong>of</strong> <strong>the</strong> crack tip exceeded a<br />
tensile strength <strong>The</strong> change criterion. in topology <strong>The</strong>n, was to a<strong>the</strong> largenode extent alleviated is splitbyinto <strong>the</strong> advent two <strong>of</strong> nodes meshless <strong>and</strong> methods, <strong>the</strong> tip <strong>of</strong><br />
such as <strong>the</strong> element-free Galerkin method [4]. Indeed, successful analyses have been carried out<br />
<strong>the</strong> crackusing is assumed <strong>the</strong>se methods, to propagate but disadvantages to including <strong>the</strong> next difficulties node. with When robust <strong>the</strong> three-dimensional tensile strength<br />
criterion is<br />
implementations,<br />
violated at<strong>the</strong> this<br />
largenode, computational<br />
it is split<br />
dem<strong>and</strong><strong>and</strong> compared<br />
<strong>the</strong><br />
with<br />
procedure<br />
finite element<br />
is<br />
methods,<br />
repeated.<br />
<strong>the</strong><br />
somewhat ad hoc manner in which <strong>the</strong> support <strong>of</strong> a node is changed in <strong>the</strong> presence <strong>of</strong> a crack [5]<br />
Figure 1. Early discrete crack modelling.<br />
Copyright # 2004 John Wiley & Sons, Ltd. Int. J. Numer. Anal. Meth. Geomech. 2004; 28:583–607<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 7
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior<br />
B. Smeared Cracking<br />
In a smeared crack approach, <strong>the</strong> nucleation <strong>of</strong> one or more cracks in<br />
<strong>the</strong> volume is translated into a deterioration <strong>of</strong> <strong>the</strong> current stiffness<br />
<strong>and</strong> strength.<br />
Generally, when <strong>the</strong> combination <strong>of</strong> stresses satisfies a specified<br />
criterion, e.g. <strong>the</strong> major principal stress reaching <strong>the</strong> tensile strength<br />
f t ; a crack is initiated.<br />
This implies that at <strong>the</strong> integration point where <strong>the</strong> stress, strain <strong>and</strong><br />
history variables are monitored, <strong>the</strong> isotropic stress - strain relation is<br />
replaced by an orthotropic elasticity-type relation with <strong>the</strong> n,s-axes<br />
being axes <strong>of</strong> orthotropy; n is <strong>the</strong> direction normal to <strong>the</strong> crack <strong>and</strong> s<br />
is <strong>the</strong> direction tangential to <strong>the</strong> crack.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 8
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior<br />
surface <strong>for</strong> <strong>the</strong> concrete. Consequently, a criterion <strong>for</strong> failure <strong>of</strong> <strong>the</strong> concrete due to a<br />
multiaxial stress state can be calculated (William <strong>and</strong> Warnke 1975).<br />
A three-dimensional failure surface <strong>for</strong> concrete is shown in Figure 2.7. <strong>The</strong> most<br />
significant nonzero principal stresses are in <strong>the</strong> x <strong>and</strong> y directions, represented by σxp <strong>and</strong><br />
σyp, respectively. Three failure surfaces are shown as projections on <strong>the</strong> σxp-σyp plane.<br />
<strong>The</strong> mode <strong>of</strong> failure is a function <strong>of</strong> <strong>the</strong> sign <strong>of</strong> σzp (principal stress in <strong>the</strong> z direction).<br />
For example, if σxp <strong>and</strong> σyp are both negative (compressive) <strong>and</strong> σzp is slightly positive<br />
(tensile), cracking would be predicted in a direction perpendicular to σzp. However, if σzp<br />
is zero or slightly negative, <strong>the</strong> material is assumed to crush (ANSYS 1998).<br />
One such criterion is utilized by ANSYS accounting <strong>for</strong> both crushing & cracking.<br />
fc ’<br />
fr<br />
fc ’<br />
fr<br />
For σ xp, σ yp ≤ 0 (compressive) <strong>and</strong> σ zp > 0<br />
(tensile), cracking would be predicted in a direction<br />
perpendicular to σ zp. However, if σ zp ≤ 0, <strong>the</strong><br />
material is assumed to crush.<br />
Figure 2.7: 3-D failure surface <strong>for</strong> concrete (ANSYS 1998)<br />
After cracking, <strong>the</strong> elastic modulus <strong>of</strong> <strong>the</strong> concrete element is set to zero in <strong>the</strong><br />
direction parallel to <strong>the</strong> principal tensile stress direction.<br />
Crushing occurs when compressive stresses exceed <strong>the</strong> compressive failure<br />
strength.<br />
In a concrete element, cracking occurs when <strong>the</strong> principal tensile stress in any direction<br />
lies outside <strong>the</strong> failure surface. After cracking, <strong>the</strong> elastic modulus <strong>of</strong> <strong>the</strong> concrete<br />
element is set to zero in <strong>the</strong> direction parallel to <strong>the</strong> principal tensile stress direction.<br />
Crushing occurs when all principal stresses are compressive <strong>and</strong> lie outside <strong>the</strong> failure<br />
surface; subsequently, <strong>the</strong> elastic modulus is set to zero in all directions (ANSYS 1998),<br />
<strong>and</strong> <strong>the</strong> element effectively disappears.<br />
During this study, it was found that if <strong>the</strong> crushing capability <strong>of</strong> <strong>the</strong> concrete is turned on,<br />
<strong>the</strong> finite element beam models fail prematurely. Crushing <strong>of</strong> <strong>the</strong> concrete started to<br />
develop in elements located directly under <strong>the</strong> loads. Subsequently, adjacent concrete<br />
In practice, a pure compression failure <strong>of</strong> concrete is unlikely. <strong>The</strong>re<strong>for</strong>e, crushing<br />
13<br />
is ignored <strong>and</strong> cracking controls failure.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 9
ffness <strong>of</strong> <strong>the</strong> entire structure based on diaphragmatic<br />
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior<br />
Steel Material Models<br />
onventional stress-strain curves both <strong>for</strong> unconfined<br />
parabolic stress-strain relationship with a s<strong>of</strong>tening<br />
-strain diagram with hardening is implemented. <strong>The</strong><br />
in Figure 1.<br />
80<br />
f y<br />
E<br />
E p<br />
60<br />
STRESS [ksi]<br />
40<br />
R=20<br />
R=5<br />
20<br />
Bilinear Model with Hardening<br />
confined concrete <strong>and</strong> b) <strong>for</strong> rein<strong>for</strong>cing steel<br />
al elements namely; beams, columns <strong>and</strong> shear walls<br />
torey buildings. By combining such elements one<br />
nked toge<strong>the</strong>r through diaphragms at <strong>the</strong> floor levels<br />
0<br />
0 0.002 0.004 0.006 0.008<br />
STRAIN [in/in]<br />
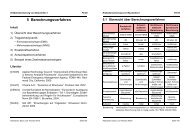
Giuffrè-Menegotto-Pinto Model<br />
Figure 15. Material Parameters <strong>of</strong> Monotonic Envelope <strong>of</strong> Steel_2 Model<br />
100<br />
R controls 80 <strong>the</strong> transition from elastic to<br />
Stress [ksi]<br />
60<br />
40<br />
20<br />
inelastic branch.<br />
Institute <strong>of</strong> Structural Engineering<br />
0<br />
<strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 10
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior<br />
Steel Cyclic Model<br />
Figure 2. Steel cyclic model.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 11
finite element analysis textbooks <strong>for</strong> a more <strong>for</strong>mal <strong>and</strong> complete introduction to basic concepts<br />
if needed.<br />
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior - 3D Solid<br />
Approach<br />
2.2 ELEMENT TYPES<br />
Concrete Modeling using Solid <strong>Element</strong>s<br />
2.2.1 Rein<strong>for</strong>ced Concrete<br />
A solid (3D) finite element can be used to model <strong>the</strong> concrete. For<br />
An example, eight-node ANSYS solid element, usesSolid65, an eight was node used element to model <strong>the</strong> (Solid concrete. 65) with <strong>The</strong> solid three element degrees has<br />
eight nodes with three degrees <strong>of</strong> freedom at each node – translations in <strong>the</strong> nodal x, y, <strong>and</strong> z<br />
directions.<br />
<strong>of</strong> freedom<br />
<strong>The</strong> element<br />
at each<br />
is<br />
node<br />
capable<br />
translations<br />
<strong>of</strong> plastic de<strong>for</strong>mation,<br />
in <strong>the</strong> nodal<br />
cracking<br />
x, y,<br />
in three<br />
<strong>and</strong> z<br />
orthogonal<br />
directions.<br />
directions, <strong>The</strong> element <strong>and</strong> crushing. is capable <strong>The</strong> geometry <strong>of</strong> plastic <strong>and</strong> de<strong>for</strong>mation, node locations <strong>for</strong> cracking this element in three type orthogonal<br />
are shown in<br />
Figure directions, 2.1. <strong>and</strong> crushing.<br />
Figure 2.1: Solid65 – 3-D rein<strong>for</strong>ced concrete solid (ANSYS 1998)<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 12
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior - 3D Solid<br />
Approach<br />
LINK8 is a spar which may be used in a variety <strong>of</strong> engineering applications. Depending<br />
application, <strong>the</strong> element may be thought <strong>of</strong> as a truss element, a cable element, a link el<br />
element, etc. <strong>The</strong> three-dimensional spar element is a uniaxial tension-compression elem<br />
degrees <strong>of</strong> freedom at each node: translations in <strong>the</strong> nodal x, y, <strong>and</strong> z directions. As in a<br />
structure, no bending <strong>of</strong> <strong>the</strong> element is considered. Plasticity, creep, swelling, stress stiff<br />
deflection capabilities are included. See Section 14.8 in <strong>the</strong> ANSYS <strong>The</strong>ory Reference fo<br />
about this element. A tension only compression-only element is defined as LINK10 <strong>and</strong><br />
Rein<strong>for</strong>cing Steel Modeling using Solid <strong>Element</strong>s<br />
A truss element can be used to model <strong>the</strong> steel rein<strong>for</strong>cement. Two nodes<br />
are required <strong>for</strong> this element. Each node has three degrees <strong>of</strong> freedom,<br />
translations in <strong>the</strong> nodal x, y, <strong>and</strong> z directions.<br />
For example, ANSYSection uses4.10.<br />
<strong>the</strong> LINK8, a uniaxial tension-compression<br />
element, which is also capable <strong>of</strong> plastic de<strong>for</strong>mation.<br />
Figure 4.8-1 LINK8 3-D Spar<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 13
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior - Beam<br />
Approach<br />
Alternative View to <strong>the</strong> simulation <strong>of</strong> Degrading Hysteretic<br />
Behavior<br />
nts - Galerkin<br />
<strong>The</strong> well known 1D beam element can be used as a simplified tool<br />
ht functions <strong>for</strong> <strong>the</strong><strong>and</strong> simulation trial solutions <strong>of</strong> <strong>the</strong> are rein<strong>for</strong>ced column behavior in place <strong>of</strong> <strong>the</strong><br />
ight 3D functions solid element <strong>and</strong> trial solutions <strong>for</strong>mulation.<br />
pe functions are<br />
This element has two degrees <strong>of</strong> freedom per node, one translational<br />
(perpendicular to <strong>the</strong> beam axis) <strong>and</strong> one rotational.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 14
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior - Beam<br />
Approach<br />
<strong>The</strong> shape functions utilized from this element are <strong>the</strong> Hermite<br />
Beam <strong>Element</strong>s - Shape Functions<br />
Polynomials (see Lecture 6)<br />
Hermite Polynomials<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 15
Modeling <strong>of</strong> Rein<strong>for</strong>ced Concrete Behavior - Beam<br />
Approach<br />
<strong>The</strong>n, as we saw in Lecture 6, <strong>the</strong> elastic <strong>for</strong>ce de<strong>for</strong>mation relationship, <strong>for</strong><br />
a prismatic beam without shearing de<strong>for</strong>mations, is<br />
⎡ ⎤ ⎡<br />
⎤ ⎡ ⎤<br />
F i<br />
12 6L −12 6L v i<br />
⎢ M i<br />
⎥<br />
⎣ F j<br />
⎦ = EI<br />
⎢ 6L 4L 2 −6L −2L 2<br />
⎥ ⎢ φ i<br />
⎥<br />
L 3 ⎣ −12 −6L 12 −6L ⎦ ⎣ v j<br />
⎦ or F E = K E v<br />
M j<br />
−6L −2L 2 −6L 4L 2 φ j<br />
Whilst , from Lecture 8, we saw that in case P-Delta effects are taken into<br />
account, <strong>the</strong> geometric (nonlinear) stiffness is:<br />
⎡ ⎤ ⎡<br />
⎤ ⎡ ⎤<br />
F i<br />
36 3L −36 3L v i<br />
⎢ M i<br />
⎥<br />
⎣ F j<br />
⎦ = T<br />
⎢ 3L 4L 2 −3L −L 2<br />
⎥ ⎢ φ i<br />
⎥<br />
30L ⎣ −36 −3L 36 −3L ⎦ ⎣ v j<br />
⎦ or F G = K G v<br />
M j<br />
3L −L 2 −3L 4L 2 φ j<br />
<strong>The</strong>re<strong>for</strong>e, <strong>the</strong> total <strong>for</strong>ces acting on <strong>the</strong> beam element will be:<br />
F T = F E + F G = [K E + K G ]v = K T v<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 16
Moment Curvature Envelope<br />
In order to simulate <strong>the</strong> effects <strong>of</strong> varying stiffness due to plasticity<br />
appropriate plasticity model <strong>and</strong> a hysteretic law will be<br />
introduced.<br />
<strong>The</strong> hysteretic model is <strong>for</strong>mulated based on an initial<br />
moment-curvature relationship o<strong>the</strong>rwise known as <strong>the</strong> backbone<br />
skeleton curve.<br />
Such skeleton curves must be defined <strong>for</strong> each different section type.<br />
For instance, <strong>the</strong> bottom sections are more heavily rein<strong>for</strong>ced than<br />
<strong>the</strong> top. <strong>The</strong>se curves can be ei<strong>the</strong>r user defined or can be computed<br />
using a fiber model.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 17
Moment Curvature Envelope<br />
Rein<strong>for</strong>ced Concrete Design Calculations normally assume a simple material<br />
model <strong>for</strong> <strong>the</strong> concrete <strong>and</strong> rein<strong>for</strong>cement so as to determine <strong>the</strong> moment<br />
capacity <strong>of</strong> a section. <strong>The</strong> Whitney stress block <strong>for</strong> concrete along with an elasto<br />
- plastic rein<strong>for</strong>cing steel behavior is one widely used material model.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 18
Moment Curvature Envelope<br />
However, <strong>the</strong> actual material behavior is nonlinear <strong>and</strong> can be described by<br />
idealized stress-strain (material) models, as <strong>the</strong> ones introduced earlier.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 19
Moment Curvature Envelope<br />
Moment Curvature <strong>Analysis</strong><br />
is a method to accurately determine <strong>the</strong> load - de<strong>for</strong>mation behavior <strong>of</strong> a<br />
concrete section using nonlinear material stress-strain relationships.<br />
For a given axial load <strong>the</strong>re exists an extreme compression fiber strain<br />
<strong>and</strong> a section curvature φ at which <strong>the</strong> nonlinear stress distribution is<br />
in equilibrium with <strong>the</strong> applied axial load. Dividing <strong>the</strong> section into<br />
fibers at distance z from <strong>the</strong> CG axis <strong>the</strong> strain distribution will be:<br />
ε(z) = ε 0 + zφ<br />
A unique bending moment can be calculated at this section curvature<br />
from <strong>the</strong> stress distribution.<br />
<strong>The</strong> extreme concrete compression strain <strong>and</strong> section curvature can be<br />
iterated until a range <strong>of</strong> moment curvature values is obtained.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 20
Moment Curvature Envelope<br />
S<strong>of</strong>tware packages are available <strong>for</strong> generating Moment - Curvature<br />
relationships by inputing <strong>the</strong>, geometry, rein<strong>for</strong>cement characteristics,<br />
material properties <strong>and</strong> axial load <strong>for</strong> a given section.<br />
Material properties <strong>for</strong> concrete can be obtained as a result <strong>of</strong> lab<br />
compression tests on <strong>the</strong> utilized concrete mix.<br />
Material properties from Steel can be directly obtained from <strong>the</strong> quality <strong>of</strong><br />
<strong>the</strong> rein<strong>for</strong>cing Steel<br />
S<strong>of</strong>tware packages that can be used <strong>for</strong> <strong>the</strong> generation <strong>of</strong> Moment<br />
Curvature Envelopes are:<br />
SAP section designer (<strong>for</strong> those that have access to SAP2000)<br />
Response 2000: http://www.ecf.utoronto.ca/ bentz/r2k.htm<br />
MyBiaxial:<br />
http://users.ntua.gr/vkoum/links-prog/MyBiaxial/mybiaxial.htm<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 21
Plasticity Model<br />
<strong>The</strong>re are different approaches <strong>for</strong> <strong>the</strong> modeling <strong>of</strong> inelastic behavior.<br />
Concentrate Plasticity (plastic hinge approach)<br />
Distributed Plasticity<br />
Spread Plasticity<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 22
Plasticity Model<br />
Concentrated Plasticity Model<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 23
Plasticity Model<br />
Distributed & Spread Plasticity Models<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 24
Plasticity Model<br />
Distributed & Spread Plasticity Models<br />
source: Hwasung Roh, Andrei M. Reinhorn, Jong Seh Lee, Power spread plasticity model <strong>for</strong> inelastic analysis <strong>of</strong><br />
rein<strong>for</strong>ced concrete structures, Engineering Structures, Volume 39, June 2012, Pages 148-16<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 25
Bouc - Wen Hysteretic Model<br />
<strong>The</strong> smooth hysteretic model presented herein is a variation <strong>of</strong> <strong>the</strong><br />
model originally proposed by Bouc (1967) <strong>and</strong> modified by several<br />
o<strong>the</strong>rs (Wen 1976; Baber Noori 1985).<br />
<strong>The</strong> use <strong>of</strong> such a hysteretic constitutive law is necessary <strong>for</strong> <strong>the</strong><br />
effective simulation <strong>of</strong> <strong>the</strong> behavior <strong>of</strong> R/C structures under cyclic<br />
loading, since <strong>of</strong>ten structures that undergo inelastic de<strong>for</strong>mations<br />
<strong>and</strong> cyclic behavior weaken <strong>and</strong> lose some <strong>of</strong> <strong>the</strong>ir stiffness <strong>and</strong><br />
strength. Moreover, gaps tend to develop due to cracking causing<br />
<strong>the</strong> material to become discontinuous.<br />
<strong>The</strong> Bouc-Wen Hysteretic Model is capable <strong>of</strong> simulating stiffness<br />
degradation, strength deterioration <strong>and</strong> progressive pinching effects.<br />
(see: V. Koumousis, E. Chatzi <strong>and</strong> S. Triantafillou: Plastique “A Computer Program For 3D Inelastic <strong>Analysis</strong> Of<br />
Multi-Storey Buildings, Advances in Engineering Structures, Mechanics & Construction, Solid Mechanics <strong>and</strong> Its<br />
Applications, 2006, Volume 140, Part 3, 367-378)<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 26
elation between generalized moments <strong>and</strong> curvatures is given by:<br />
<br />
M () t = M + ( 1 −α)<br />
z()<br />
t <br />
φ()<br />
t<br />
Bouc - Wen Hysteretic Model<br />
y α<br />
<br />
φy<br />
φ()<br />
t <br />
<br />
M () t = My<br />
α<br />
+ ( 1 −α)<br />
z()<br />
t <br />
where My is <strong>the</strong> yield moment; y is <strong>the</strong> yield curvature; is <strong>the</strong> ratio <strong>of</strong> <strong>the</strong> post-yield to <strong>the</strong> initial<br />
<strong>The</strong> model can be visualized as a linear <br />
<strong>and</strong> φy<br />
a nonlinear <br />
element in parallel:<br />
elastic stiffness <strong>and</strong> z(t) is <strong>the</strong> hysteretic component defined below.<br />
where M y is <strong>the</strong> yield moment; y is <strong>the</strong> yield curvature; is <strong>the</strong> ratio <strong>of</strong> <strong>the</strong> post-yield to <strong>the</strong> initial<br />
elastic stiffness <strong>and</strong> z(t) is <strong>the</strong> hysteretic component defined below.<br />
(1)<br />
(1)<br />
Figure 3. Bouc-Wen Hysteretic Model<br />
<strong>The</strong> relation <strong>The</strong> nondimensional betweenhysteretic generalized function z(t) moments is <strong>the</strong> solution <strong>and</strong> <strong>of</strong> <strong>the</strong> curvatures following non-linear is differential given by:<br />
equation:<br />
[<br />
M(t) = M y α φ(t)<br />
]<br />
+ (1 − α)z(t)<br />
nB<br />
. . 1 dz 1 1 + sign( dφ) | z( t)| + z( t)<br />
<br />
zt ()= f (φ(t), zt ()) or alternatively = Kz<br />
where Kz<br />
= A−B<br />
−<br />
φy<br />
dφ φy<br />
φ y <br />
2 2 <br />
Figure 3. Bouc-Wen Hysteretic Model<br />
C D E <br />
where My is <strong>the</strong> yield moment; φ y is <strong>the</strong> yield curvature; α is <strong>the</strong> ratio <strong>of</strong><br />
n n n<br />
1 + signd ( φ) | zt ()| −zt () 1 − signd ( φ) | zt ()| + zt () 1 −signd ( φ) | zt ()| −zt<br />
() <br />
C −D −E<br />
<br />
2 2 2 2 2 2 <br />
<strong>the</strong> <strong>The</strong> post-yield nondimensional to <strong>the</strong> hysteretic initialfunction elastic z(t) stiffness is <strong>the</strong> solution <strong>and</strong> z(t) <strong>of</strong> is <strong>the</strong> <strong>the</strong> following hysteretic non-linear differential<br />
component defined as:<br />
In <strong>the</strong> above expression A, B, C, D & E are constants which control <strong>the</strong> shape <strong>of</strong> <strong>the</strong> hysteretic loop<br />
equation: <strong>for</strong> each direction <strong>of</strong> loading, while <strong>the</strong> exponents nB, nC, nD & nE govern <strong>the</strong> transition from <strong>the</strong> elastic<br />
to <strong>the</strong> plastic state. Small values <strong>of</strong> ni lead to a smooth transition, however as ni increases <strong>the</strong> transition<br />
becomes sharper tending to a perfectly bilinear behavior in <strong>the</strong> limit (n∞).<br />
nB<br />
. . 1 dz 1 1 + sign( dφ) | z( t)| + z( t)<br />
<br />
zt ()= f (φ(t), <strong>The</strong> program zt ()) defaults or alternatively are: = Kz<br />
where Kz<br />
= A−B<br />
−<br />
φy<br />
dφ φ<br />
−<br />
1 1y<br />
−M<br />
y<br />
<br />
2 2 <br />
A = 1, C=D=0 & B= , E= where e=<br />
, b=1 <strong>and</strong> n<br />
nB<br />
nE<br />
+<br />
B<br />
=n<br />
E<br />
=n (3)<br />
(2)<br />
nC b e<br />
M n<br />
y D nE<br />
1 + signd ( φ) | zt ()| −zt () 1 − signd ( φ) | zt ()| + zt () 1 −signd ( φ) | zt ()| −zt<br />
() <br />
C<br />
2<strong>The</strong> parameters C, 2 D control −D E<br />
<strong>the</strong> gradient 2<strong>of</strong> <strong>the</strong> hysteretic <br />
2loop after −<br />
unloading occurs. 2 <strong>The</strong> assignment<br />
<br />
2 <br />
<strong>of</strong> null values <strong>for</strong> both, results to unloading stiffness equal to that <strong>of</strong> <strong>the</strong> elastic branch. Also, <strong>the</strong> <br />
model is capable Institute <strong>of</strong> simulating <strong>of</strong> Structural non symmetrical Engineeringyielding, <strong>Method</strong> so if <strong>the</strong> <strong>of</strong>positive <strong>Finite</strong> <strong>Element</strong>s yield moment II is regarded<br />
27<br />
(2)
Bouc - Wen Hysteretic Model<br />
In <strong>the</strong> above expression A, B, C, D & E are constants which control <strong>the</strong><br />
shape <strong>of</strong> <strong>the</strong> hysteretic loop <strong>for</strong> each direction <strong>of</strong> loading, while <strong>the</strong><br />
exponents n B , n C , n D & n E govern <strong>the</strong> transition from <strong>the</strong> elastic to <strong>the</strong><br />
plastic state. Small values <strong>of</strong> n i lead to a smooth transition, however as n i<br />
increases <strong>the</strong> transition becomes sharper tending to a perfectly bilinear<br />
behavior in <strong>the</strong> limit (n i → ∞).<br />
“Plastique” Finally, – A<strong>the</strong> Computer flexural Program stiffness <strong>for</strong>can <strong>Analysis</strong> be expressed <strong>of</strong> Multi-Storey as: Buildings 371<br />
Finally, <strong>the</strong> flexural stiffness can be expressed as:<br />
dM 1 dz 1 1 <br />
K = EI = = M y α + ( 1− α) = M y α + ( 1− α) Kz = EI0<br />
α + ( 1−α)<br />
Kz<br />
dφ φy dφ φy φy<br />
<br />
6.1 Hysteretic behavior Variations<br />
(4)<br />
a) Stiffness Degradation<br />
<strong>The</strong> stiffness degradation that occurs due to cyclic loading is taken into account by introducing <strong>the</strong><br />
parameter into <strong>the</strong> differential equation:<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 28
Modeling <strong>of</strong> Degradation<br />
Stiffness Degradation<br />
Strength Deterioration<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 29
Modeling <strong>of</strong> Degradation<br />
<strong>The</strong> parameter S depends on <strong>the</strong> damage <strong>of</strong> <strong>the</strong> section which is quantified by <strong>the</strong> Damage Index DI:<br />
µ max − 1 1<br />
S = 1 − S d DI where DI =<br />
(7)<br />
β<br />
µ − 1<br />
2<br />
<br />
Strength Deterioration<br />
1<br />
<br />
S p<br />
c S<br />
p<br />
dEdiss<br />
1 −<br />
<br />
4Emon<br />
<br />
<br />
<br />
In <strong>the</strong> above expression S d , S p1 , S p2 are constants controlling <strong>the</strong> amount <strong>of</strong> strength deterioration; µ c is<br />
<strong>the</strong> maximum plasticity that can be reached, µ c = φu / φ y; dE<br />
diss<br />
is <strong>the</strong> energy dissipated be<strong>for</strong>e<br />
unloading occurs <strong>and</strong> finally E mon is <strong>the</strong> amount <strong>of</strong> energy absorbed during a monotonic loading until<br />
failure as shown in Figure 4.<br />
Figure 4. Dissipated Energy (Ediss) <strong>and</strong> Monotonic Energy (Emon).<br />
<strong>The</strong> model can also be appropriately modified to simulate pinching.<br />
Note: <strong>The</strong> Matlab code <strong>for</strong> <strong>the</strong> Bouc Wen Model will be provided!<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 30
Bouc Wen Model<br />
Resulting Hysteretic Loops<br />
Stiffness & Strength Degradation<br />
Pinching<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 31
Bouc Wen Model<br />
Dynamic Equation <strong>of</strong> Motion<br />
This is a dynamic problem (input: base excitation Ü g ). <strong>The</strong> general<br />
equation <strong>of</strong> motion is <strong>the</strong>re<strong>for</strong>e written as:<br />
MẌ(t) + CẊ(t) + KX(t) = −MÜ g (t)<br />
<strong>The</strong> Newmark Constant acceleration method outlined in Lecture 8 can<br />
be used <strong>for</strong> <strong>the</strong> direct integration <strong>of</strong> <strong>the</strong> above equation.<br />
(You can neglect <strong>the</strong> effect <strong>of</strong> damping <strong>for</strong> this project)<br />
In order to achieve equilibrium within each time step, it is necessary to<br />
implement a Newton - Raphson iterative scheme as outlined in Lecture 3.<br />
Institute <strong>of</strong> Structural Engineering <strong>Method</strong> <strong>of</strong> <strong>Finite</strong> <strong>Element</strong>s II 32