


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
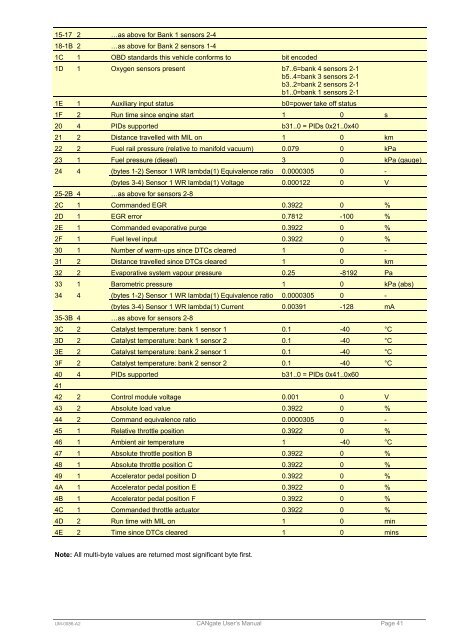
15-17 2 …as above for Bank 1 sensors 2-4<br />
18-1B 2 …as above for Bank 2 sensors 1-4<br />
1C 1 OBD standards this vehicle conforms to bit encoded<br />
1D 1 Oxygen sensors present b7..6=bank 4 sensors 2-1<br />
b5..4=bank 3 sensors 2-1<br />
b3..2=bank 2 sensors 2-1<br />
b1..0=bank 1 sensors 2-1<br />
1E 1 Auxiliary input status b0=power take off status<br />
1F 2 Run time since engine start 1 0 s<br />
20 4 PIDs supported b31..0 = PIDs 0x21..0x40<br />
21 2 Distance travelled with MIL on 1 0 km<br />
22 2 Fuel rail pressure (relative to manifold vacuum) 0.079 0 kPa<br />
23 1 Fuel pressure (diesel) 3 0 kPa (gauge)<br />
24 4<br />
(bytes 1-2) Sensor 1 WR lambda(1) Equivalence ratio 0.0000305 0 -<br />
(bytes 3-4) Sensor 1 WR lambda(1) Voltage 0.000122 0 V<br />
25-2B 4 …as above for sensors 2-8<br />
2C 1 Commanded EGR 0.3922 0 %<br />
2D 1 EGR error 0.7812 -100 %<br />
2E 1 Commanded evaporative purge 0.3922 0 %<br />
2F 1 Fuel level input 0.3922 0 %<br />
30 1 Number of warm-ups since DTCs cleared 1 0 -<br />
31 2 Distance travelled since DTCs cleared 1 0 km<br />
32 2 Evaporative system vapour pressure 0.25 -8192 Pa<br />
33 1 Barometric pressure 1 0 kPa (abs)<br />
34 4<br />
(bytes 1-2) Sensor 1 WR lambda(1) Equivalence ratio 0.0000305 0 -<br />
(bytes 3-4) Sensor 1 WR lambda(1) Current 0.00391 -128 mA<br />
35-3B 4 …as above for sensors 2-8<br />
3C 2 Catalyst temperature: bank 1 sensor 1 0.1 -40 °C<br />
3D 2 Catalyst temperature: bank 1 sensor 2 0.1 -40 °C<br />
3E 2 Catalyst temperature: bank 2 sensor 1 0.1 -40 °C<br />
3F 2 Catalyst temperature: bank 2 sensor 2 0.1 -40 °C<br />
40 4 PIDs supported b31..0 = PIDs 0x41..0x60<br />
41<br />
42 2 Control module voltage 0.001 0 V<br />
43 2 Absolute load value 0.3922 0 %<br />
44 2 Command equivalence ratio 0.0000305 0 -<br />
45 1 Relative throttle position 0.3922 0 %<br />
46 1 Ambient air temperature 1 -40 °C<br />
47 1 Absolute throttle position B 0.3922 0 %<br />
48 1 Absolute throttle position C 0.3922 0 %<br />
49 1 Accelerator pedal position D 0.3922 0 %<br />
4A 1 Accelerator pedal position E 0.3922 0 %<br />
4B 1 Accelerator pedal position F 0.3922 0 %<br />
4C 1 Commanded throttle actuator 0.3922 0 %<br />
4D 2 Run time with MIL on 1 0 min<br />
4E 2 Time since DTCs cleared 1 0 mins<br />
Note: All multi-byte values are returned most significant byte first.<br />
UM-0086-A2 <strong>CANgate</strong> User’s <strong>Manual</strong> Page 41
