Software engineering for real-time systems
Software engineering for real-time systems
Software engineering for real-time systems

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
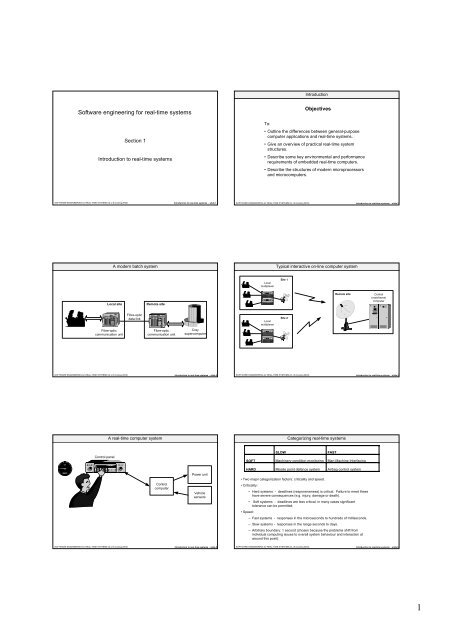
<strong>Software</strong> <strong>engineering</strong> <strong>for</strong> <strong>real</strong>-<strong>time</strong> <strong>systems</strong><br />
Section 1<br />
Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong><br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 1<br />
Fibre-optic<br />
communication unit<br />
A modern batch system<br />
Local site<br />
Fibre-optic<br />
data link<br />
Remote site<br />
Fibre-optic<br />
communication unit<br />
Cray<br />
supercomputer<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 3<br />
Control panel<br />
A <strong>real</strong>-<strong>time</strong> computer system<br />
Control<br />
computer<br />
Power unit<br />
Vehicle<br />
sensors<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 5<br />
Introduction<br />
Objectives<br />
To:<br />
• Outline the differences between general-purpose<br />
computer applications and <strong>real</strong>-<strong>time</strong> <strong>systems</strong>.<br />
Give an overview of practical <strong>real</strong>-<strong>time</strong> system<br />
structures.<br />
Describe some key environmental and per<strong>for</strong>mance<br />
requirements of embedded <strong>real</strong>-<strong>time</strong> computers.<br />
Describe the structures of modern microprocessors<br />
and microcomputers.<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 2<br />
Local<br />
multiplexer<br />
Local<br />
multiplexer<br />
Typical interactive on-line computer system<br />
Site 1<br />
Site 2<br />
Remote site<br />
Central<br />
(mainframe)<br />
computer<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 4<br />
Categorizing <strong>real</strong>-<strong>time</strong> <strong>systems</strong><br />
SLOW FAST<br />
SOFT Machinery condition monitoring Man-Machine Interfacing<br />
HARD Missile point defence system Airbag control system<br />
Two major categorization factors: criticality and speed.<br />
Criticality:<br />
Hard <strong>systems</strong> - deadlines (responsiveness) is critical. Failure to meet these<br />
have severe consequences (e.g. injury, damage or death).<br />
Soft <strong>systems</strong> - deadlines are less critical; in many cases significant<br />
tolerance can be permitted.<br />
Speed:<br />
– Fast <strong>systems</strong> - responses in the microseconds to hundreds of milliseconds.<br />
– Slow <strong>systems</strong> - responses in the range seconds to days.<br />
– Arbitrary boundary: 1 second (chosen because the problems shift from<br />
individual computing issues to overall system behaviour and interaction at<br />
around this point).<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 6<br />
1
Execution Deadlines <strong>Software</strong> <strong>Software</strong><br />
<strong>time</strong><br />
size<br />
complexity<br />
Hard - Fast <br />
Hard - Slow <br />
Soft - Fast <br />
<br />
Soft - Slow <br />
Attribute rating<br />
Low high<br />
Attributes of <strong>real</strong>-<strong>time</strong> <strong>systems</strong><br />
Major attributes of <strong>real</strong>-<strong>time</strong> <strong>systems</strong>.<br />
For hard <strong>systems</strong> emphasis is placed on the need to meet deadlines.<br />
Hard-fast <strong>systems</strong> tend to have low software complexity.<br />
For soft-fast <strong>systems</strong> emphasis is put on computation per<strong>for</strong>mance.<br />
In general soft <strong>systems</strong> tend to be the more complex ones (from a software<br />
perspective).<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 7<br />
Sea Skua missile system<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 9<br />
Typical avionic plat<strong>for</strong>ms<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 11<br />
Remote plant 1<br />
Sensors<br />
Actuators<br />
Microprocessor-based outstation<br />
Data collection<br />
Control functions<br />
Communication interface<br />
Land line<br />
communication link<br />
(10 miles)<br />
Central control<br />
room<br />
Telemetry control system<br />
Main control<br />
computer<br />
Local area network<br />
Operator display<br />
and controls<br />
Front-end<br />
communication<br />
interface<br />
Data logging<br />
computer<br />
Wireless<br />
communication link<br />
(100 miles)<br />
Hot standby<br />
control computer<br />
Management<br />
in<strong>for</strong>mation<br />
computer<br />
Remote<br />
plant 2<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 8<br />
Submarine control console<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 10<br />
Microprocessor-based vending machine units<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 12<br />
2
Consumer communications<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 13<br />
Embedded <strong>systems</strong> characteristics<br />
Embedded <strong>systems</strong><br />
characteristics<br />
Defined by<br />
Environment Per<strong>for</strong>mance Interfacing<br />
Physical Electricial Operational Speed of<br />
response<br />
Failure<br />
modes<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 15<br />
Computer loading - single synchronous (periodic) task<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 17<br />
Vendor<br />
specific<br />
Bespoke designs<br />
Board-based<br />
designs<br />
VME<br />
Embedded <strong>systems</strong> plat<strong>for</strong>ms<br />
Embedded <strong>systems</strong><br />
plat<strong>for</strong>ms<br />
PC/104<br />
Embedded PC<br />
Commercial off the shelf<br />
(COTS) equipment<br />
PC-based<br />
designs<br />
Desktop<br />
PC<br />
Ruggedized<br />
PC<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 14<br />
Typical temperature specifications <strong>for</strong> <strong>real</strong>-<strong>time</strong> <strong>systems</strong><br />
Degrees centigrade<br />
-55 0 +50 +85 +125 +200<br />
Industrial<br />
range<br />
Extended industrial<br />
range<br />
Military range<br />
Oil exploration<br />
Space exploration<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 16<br />
Event<br />
signal<br />
Computer loading - single asynchronous (aperiodic) task<br />
T e T e T e<br />
Execute<br />
event task<br />
(E)<br />
processor idle (I)<br />
Event<br />
signal<br />
Execute<br />
event task<br />
(E)<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 18<br />
(I)<br />
Event<br />
signal<br />
Execute<br />
event task<br />
(E)<br />
Time<br />
(I)<br />
3
S 1<br />
Computer loading - multiple asynchronous (aperiodic) tasks<br />
(E1) = Event task 1 execution<br />
(E2) = Event task 2 execution<br />
(S1) = Event signal, task1<br />
(S2) = Event signal, task 2<br />
(I) = Idle (spare) <strong>time</strong><br />
(E (I)<br />
1 ) (I) (E1 ) (I) (E2 )<br />
(E1 ) (I) (E1 ) (E2 )<br />
S 1<br />
S 2<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 19<br />
S 1<br />
(W) = waiting <strong>time</strong> <strong>for</strong> task to<br />
complete<br />
(W)<br />
S 1<br />
S 2<br />
Time<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 21<br />
Write<br />
control<br />
Address<br />
bus<br />
O/P<br />
I/P<br />
Address<br />
decoder<br />
Elements of a microcomputer system<br />
I/P<br />
The watchdog <strong>time</strong>r<br />
Retriggerable <strong>time</strong>r<br />
(monostable)<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 23<br />
O/P<br />
To non-maskable interrupt<br />
External alarm (optional)<br />
Timeout<br />
Time<br />
General purpose<br />
microprocessors<br />
General purpose computing<br />
Microprocessors Microcomputers<br />
Highly integrated<br />
microprocessors<br />
The computing elements of <strong>real</strong>-<strong>time</strong> <strong>systems</strong><br />
Single chip<br />
microcomputers<br />
Computing elements<br />
Single chip<br />
microcontrollers<br />
Digital signal<br />
processors<br />
(DSPs)<br />
Specialized computing<br />
Mixed signal<br />
processors<br />
Bespoke<br />
system-on-chip<br />
designs<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 20<br />
Timing in hardware<br />
Real-<strong>time</strong> clock Programmable <strong>time</strong>r<br />
Control<br />
bus<br />
Address<br />
bus<br />
Chip<br />
select<br />
line<br />
To<br />
interrupt<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 22<br />
Micro<br />
ROM<br />
RAM<br />
(a) Normal mode<br />
of operation<br />
ROM<br />
RAM<br />
DMA operation<br />
Processor hold/ack<br />
DMA<br />
controller<br />
Peripheral<br />
interface<br />
DMA<br />
controller<br />
Peripheral<br />
interface<br />
(B) DMA Fig.1.21 mode DMA operation<br />
of operation<br />
DMA<br />
request/ack<br />
DMA<br />
request/ack<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 24<br />
4
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 25<br />
I 2 C bus<br />
Interrupts<br />
Local<br />
memory<br />
Disk store<br />
Intelligent<br />
message<br />
controller<br />
(I 2 O)<br />
DMA<br />
controller<br />
Serial<br />
comms<br />
controller<br />
(I 2 C)<br />
Interrupt<br />
controller and<br />
<strong>time</strong>rs<br />
Intelligent I/O processing<br />
Primary<br />
bus<br />
Main<br />
processor<br />
I/O processor<br />
Highly integrated processor -Motorola MPC8240<br />
Secondary<br />
bus<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 27<br />
External<br />
bus<br />
PowerPC 603e<br />
microprocessor core<br />
(including floating point<br />
maths unit)<br />
Central<br />
control unit<br />
PCI bus interface<br />
unit<br />
PCI bus<br />
Data path<br />
controller<br />
Memory<br />
controller<br />
PCI bus<br />
arbiter<br />
Bus<br />
request<br />
(5)<br />
Bus<br />
grant<br />
(5)<br />
Single chip microcontroller - Fujitsu MB91F361<br />
<br />
Processor unit<br />
CPU<br />
Watchdog<br />
Interrupt controller<br />
Data RAM (16 kByte)<br />
DMA<br />
Cache memory (1<br />
kByte)<br />
Boot ROM (2 kByte)<br />
CAN<br />
interface<br />
(3)<br />
Flash<br />
(512<br />
kByte)<br />
Bus<br />
interface<br />
Sound generator<br />
LED driver<br />
GP Serial I/O<br />
I 2 C serial<br />
interface<br />
ADC (16)<br />
DAC (2)<br />
Interrupt<br />
interface (8)<br />
Stepper motor<br />
control<br />
Real-<strong>time</strong> clock<br />
Hardware <strong>time</strong>rs<br />
(6)<br />
Pulse generator<br />
Digital I/0<br />
Data<br />
bus<br />
Memory<br />
bus<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 29<br />
Address<br />
and control<br />
bus<br />
Data<br />
bus<br />
Programmable<br />
command<br />
register<br />
Data bus buffer<br />
I/O interface peripheral<br />
Address and<br />
control interface<br />
I/O port<br />
I/O port<br />
I/O port<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 26<br />
Single chip microcomputer - Philips Semiconductor 8052<br />
Clock<br />
Processor<br />
Security ROM<br />
Program store<br />
(8kByte ROM)<br />
Data store<br />
(256 Bytes RAM)<br />
External bus<br />
Hardware <strong>time</strong>rs<br />
(3)<br />
Interrupt<br />
controller<br />
Serial<br />
communication<br />
controller<br />
I/O ports (4)<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 28<br />
Digital signal processor structure<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 30<br />
8 lines<br />
8 lines<br />
8 lines<br />
5
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 31<br />
You should now:<br />
Mixed signal processor structure - Texas MSP430<br />
Clock<br />
CPU<br />
RAM<br />
(256 bytes)<br />
Flash<br />
(256 bytes)<br />
Power-on<br />
reset<br />
Watchdog<br />
<strong>time</strong>r<br />
Debug<br />
interface<br />
Analogue<br />
comparator<br />
Ports with<br />
interrupt<br />
facility (2)<br />
PWM<br />
Timer<br />
Review of ‘Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong>’<br />
Review of section<br />
• Clearly understand the important features of <strong>real</strong>-<strong>time</strong> <strong>systems</strong>.<br />
• Know what sets them apart from batch and interactive application.<br />
• See how <strong>real</strong>-<strong>time</strong> <strong>systems</strong> may be categorized in terms of speed and criticality.<br />
• Have a general understanding of the range of <strong>real</strong>-<strong>time</strong> (and especially embedded)<br />
applications.<br />
• Realize that environmental and per<strong>for</strong>mance factors are key drivers in <strong>real</strong>-<strong>time</strong><br />
<strong>systems</strong> design.<br />
• Know the basic component parts of <strong>real</strong>-<strong>time</strong> computer units.<br />
• Appreciate the essential differences between microprocessors, microcomputers and<br />
microcontrollers.<br />
• Realize why there is a large market <strong>for</strong> specialized processors.<br />
END OF SECTION ‘Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong>’<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 33<br />
Example system-on-a-chip (SOC) design<br />
Custom coprocessor<br />
Processor<br />
core<br />
RAM<br />
ROM<br />
On-chip databus (OCB)<br />
Custom I/O<br />
interface<br />
Custom<br />
peripherals<br />
and debug<br />
interface<br />
Custom<br />
MMU<br />
Custom powermanagement<br />
unit<br />
External<br />
bus<br />
SOFTWARE ENGINEERING <strong>for</strong> REAL-TIME SYSTEMS (© J.E.Cooling 2003) Introduction to <strong>real</strong>-<strong>time</strong> <strong>systems</strong> - slide 32<br />
6