

The GNSS integer ambiguities: estimation and validation
The GNSS integer ambiguities: estimation and validation
The GNSS integer ambiguities: estimation and validation

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
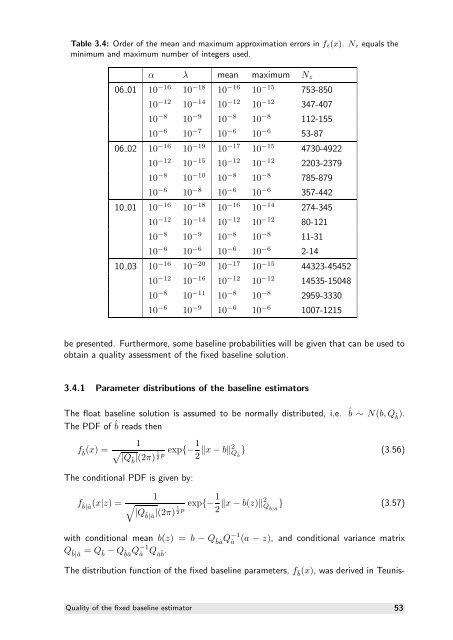
Table 3.4: Order of the mean <strong>and</strong> maximum approximation errors in fˇɛ(x). Nz equals the<br />
minimum <strong>and</strong> maximum number of <strong>integer</strong>s used.<br />
α λ mean maximum Nz<br />
06 01 10 −16 10 −18 10 −16 10 −15 753-850<br />
10 −12 10 −14 10 −12 10 −12 347-407<br />
10 −8 10 −9 10 −8 10 −8 112-155<br />
10 −6 10 −7 10 −6 10 −6 53-87<br />
06 02 10 −16 10 −19 10 −17 10 −15 4730-4922<br />
10 −12 10 −15 10 −12 10 −12 2203-2379<br />
10 −8 10 −10 10 −8 10 −8 785-879<br />
10 −6 10 −8 10 −6 10 −6 357-442<br />
10 01 10 −16 10 −18 10 −16 10 −14 274-345<br />
10 −12 10 −14 10 −12 10 −12 80-121<br />
10 −8 10 −9 10 −8 10 −8 11-31<br />
10 −6 10 −6 10 −6 10 −6 2-14<br />
10 03 10 −16 10 −20 10 −17 10 −15 44323-45452<br />
10 −12 10 −16 10 −12 10 −12 14535-15048<br />
10 −8 10 −11 10 −8 10 −8 2959-3330<br />
10 −6 10 −9 10 −6 10 −6 1007-1215<br />
be presented. Furthermore, some baseline probabilities will be given that can be used to<br />
obtain a quality assessment of the fixed baseline solution.<br />
3.4.1 Parameter distributions of the baseline estimators<br />
<strong>The</strong> float baseline solution is assumed to be normally distributed, i.e. ˆ b ∼ N(b, Qˆ b ).<br />
<strong>The</strong> PDF of ˆ b reads then<br />
fˆ b (x) =<br />
1<br />
<br />
|Qˆb |(2π) 1 exp{−1<br />
2 p<br />
<strong>The</strong> conditional PDF is given by:<br />
fˆb|â (x|z) = <br />
1<br />
|Qˆ b|â |(2π) 1<br />
2<br />
2 x − b2 Qˆ b } (3.56)<br />
p exp{−1<br />
2 x − b(z)2 Qˆ b|â } (3.57)<br />
with conditional mean b(z) = b − Qˆbâ Q −1<br />
â (a − z), <strong>and</strong> conditional variance matrix<br />
Qˆb|â = Qˆb − Qˆbâ Q −1<br />
â Qâˆb .<br />
<strong>The</strong> distribution function of the fixed baseline parameters, fˇ b (x), was derived in Teunis-<br />
Quality of the fixed baseline estimator 53













