

The GNSS integer ambiguities: estimation and validation
The GNSS integer ambiguities: estimation and validation
The GNSS integer ambiguities: estimation and validation

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
−1<br />
−2<br />
−3<br />
−4<br />
−5<br />
−6<br />
−7<br />
−7 −6 −5 −4 −3 −2 −1 0 1 2 3 4 5 6 7<br />
1.5<br />
0.5<br />
−0.5<br />
−1.5<br />
−1.5 −0.5 0.5 1.5<br />
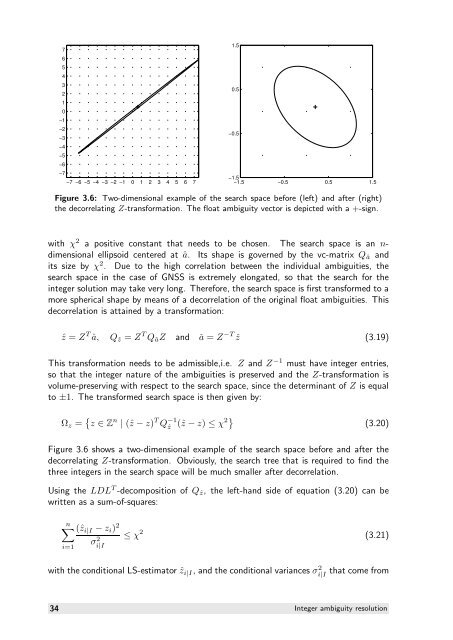
Figure 3.6: Two-dimensional example of the search space before (left) <strong>and</strong> after (right)<br />
the decorrelating Z-transformation. <strong>The</strong> float ambiguity vector is depicted with a +-sign.<br />
with χ 2 a positive constant that needs to be chosen. <strong>The</strong> search space is an ndimensional<br />
ellipsoid centered at â. Its shape is governed by the vc-matrix Qâ <strong>and</strong><br />
its size by χ 2 . Due to the high correlation between the individual <strong>ambiguities</strong>, the<br />
search space in the case of <strong>GNSS</strong> is extremely elongated, so that the search for the<br />
<strong>integer</strong> solution may take very long. <strong>The</strong>refore, the search space is first transformed to a<br />
more spherical shape by means of a decorrelation of the original float <strong>ambiguities</strong>. This<br />
decorrelation is attained by a transformation:<br />
ˆz = Z T â, Qˆz = Z T QâZ <strong>and</strong> ǎ = Z −T ˇz (3.19)<br />
This transformation needs to be admissible,i.e. Z <strong>and</strong> Z −1 must have <strong>integer</strong> entries,<br />
so that the <strong>integer</strong> nature of the <strong>ambiguities</strong> is preserved <strong>and</strong> the Z-transformation is<br />
volume-preserving with respect to the search space, since the determinant of Z is equal<br />
to ±1. <strong>The</strong> transformed search space is then given by:<br />
Ωz = z ∈ Z n | (ˆz − z) T Q −1<br />
ˆz (ˆz − z) ≤ χ2<br />
(3.20)<br />
Figure 3.6 shows a two-dimensional example of the search space before <strong>and</strong> after the<br />
decorrelating Z-transformation. Obviously, the search tree that is required to find the<br />
three <strong>integer</strong>s in the search space will be much smaller after decorrelation.<br />
Using the LDL T -decomposition of Qˆz, the left-h<strong>and</strong> side of equation (3.20) can be<br />
written as a sum-of-squares:<br />
n (ˆz i|I − zi) 2<br />
≤ χ 2<br />
i=1<br />
σ 2 i|I<br />
(3.21)<br />
with the conditional LS-estimator ˆz i|I, <strong>and</strong> the conditional variances σ2 i|I that come from<br />
34 Integer ambiguity resolution













