Chapter 3 - Dynamics of Marine Vessels
Chapter 3 - Dynamics of Marine Vessels Chapter 3 - Dynamics of Marine Vessels
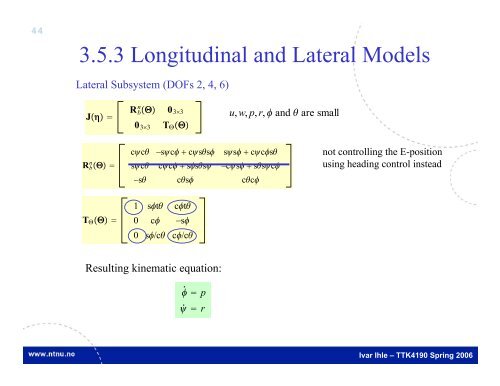
44 3.5.3 Longitudinal and Lateral Models Lateral Subsystem (DOFs 2, 4, 6) J R b n Θ TΘΘ R b n Θ 033 033 TΘΘ cc −sc css ss ccs sc cc sss −cs ssc −s cs cc 1 st ct 0 c −s 0 s/c c/c Resulting kinematic equation: ̇ p ̇ r u, w, p, r, and are small not controlling the E-position using heading control instead Ivar Ihle – TTK4190 Spring 2006
45 3.5.3 Longitudinal and Lateral Models Lateral Subsystem (DOFs 2, 4, 6) Again it is assumed that higher order velocity terms can be neglected so that Dn 0. Hence: CRB Collecting terms in v,p, and r, gives: CRB ≈ Assuming a diagonal M A gives: CA −my g p wp mz g r xgpq − my g r − ur −my g q z g ru my g p wv mz g p − vw −I yz q − I xz p I z rq I yz r Ixyp − I y qr mx g r vu my g r − uv − mx g p y g qw −I yz r − Ixyp I y qp I xz r Ixyq − I x pq 0 0 muo 0 0 0 0 0 mxguo Zẇ wp − X u̇ ur Y v̇ −Zẇ vw M q̇ −Nṙ qr X u̇ −Y v̇ uv K ṗ −Mq̇ pq v p r ≈ CRB ≠−CRB The skew-symmetric property is destroyed for the decoupled model: 0 0 −Xu̇ u 0 0 0 X u̇ −Y v̇ u 0 0 v p r Ivar Ihle – TTK4190 Spring 2006
- Page 1 and 2: 1 Chapter 3 - Dynamics of Marine Ve
- Page 3 and 4: 3 3.2.4 Ballast Systems Consider a
- Page 5 and 6: 5 3.2.4 Ballast Systems Conditions
- Page 7 and 8: 7 3.2.4 Ballast Systems Example (Se
- Page 9 and 10: 9 3.2.4 Ballast Systems Automatic P
- Page 11 and 12: 11 3.2.4 Ballast Systems Feedback c
- Page 13 and 14: 13 3.2.4 Ballast Systems Ivar Ihle
- Page 15 and 16: 15 3.3 6 DOF Equations of Motion Bo
- Page 17 and 18: 17 3.3.1 Nonlinear Equations of Mot
- Page 19 and 20: 19 3.3.2 Linearized Equations of Mo
- Page 21 and 22: 21 3.3.2 Linearized Equations of Mo
- Page 23 and 24: 23 3.3.2 Linearized Equations of Mo
- Page 25 and 26: 25 3.5 Standard Models for Marine V
- Page 27 and 28: 27 3.5.1 3 DOF Horizontal Motion Lo
- Page 29 and 30: 29 3.5.1 3 DOF Horizontal Motion Fo
- Page 31 and 32: 31 3.5.2 Decoupled Models for Forwa
- Page 33 and 34: 33 3.5.2 Decoupled Models for Forwa
- Page 35 and 36: 35 3.5.2 Decoupled Models for Forwa
- Page 37 and 38: 37 3.5.3 Longitudinal and Lateral M
- Page 39 and 40: 39 3.5.3 Longitudinal and Lateral M
- Page 41 and 42: 41 3.5.3 Longitudinal and Lateral M
- Page 43: 43 3.5.3 Longitudinal and Lateral M
- Page 47 and 48: 47 3.5.3 Longitudinal and Lateral M
44<br />
3.5.3 Longitudinal and Lateral Models<br />
Lateral Subsystem (DOFs 2, 4, 6)<br />
J <br />
R b n Θ <br />
TΘΘ <br />
R b n Θ 033<br />
033 TΘΘ<br />
cc −sc css ss ccs<br />
sc cc sss −cs ssc<br />
−s cs cc<br />
1 st ct<br />
0 c −s<br />
0 s/c c/c<br />
Resulting kinematic equation:<br />
̇ p<br />
̇ r<br />
u, w, p, r, and are small<br />
not controlling the E-position<br />
using heading control instead<br />
Ivar Ihle – TTK4190 Spring 2006


