

Chapter 3 - Dynamics of Marine Vessels
Chapter 3 - Dynamics of Marine Vessels
Chapter 3 - Dynamics of Marine Vessels

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
40<br />
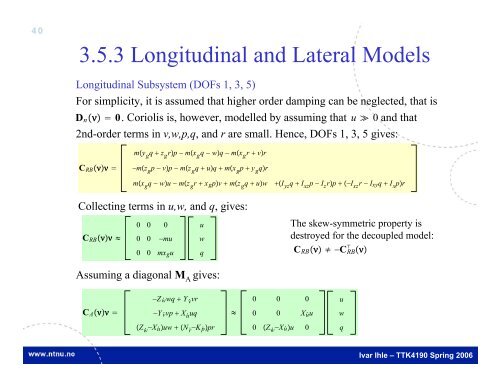
3.5.3 Longitudinal and Lateral Models<br />
Longitudinal Subsystem (DOFs 1, 3, 5)<br />
For simplicity, it is assumed that higher order damping can be neglected, that is<br />
Dn 0. Coriolis is, however, modelled by assuming that u 0 and that<br />
2nd-order terms in v,w,p,q, and r are small. Hence, DOFs 1, 3, 5 gives:<br />
CRB <br />
CRB ≈<br />
my g q z g rp − mx g q − wq − mx g r vr<br />
−mz g p − vp − mz g q uq mx g p y g qr<br />
mx g q − wu − mz g r xgpv mz g q uw I yz q I xz p − I z rp −I xz r − Ixyq I x pr<br />
Collecting terms in u,w, and q, gives:<br />
0 0 0<br />
0 0 −mu<br />
0 0 mxgu<br />
Assuming a diagonal M A gives:<br />
CA <br />
−Zẇ wq Y v̇ vr<br />
−Y v̇ vp X u̇ uq<br />
u<br />
w<br />
Z ẇ −Xu̇ uw N ṙ −Kṗ pr<br />
q<br />
≈<br />
0 0 0<br />
0 0 Xu̇ u<br />
0 Z ẇ −Xu̇ u 0<br />
CRB ≠−CRB<br />
The skew-symmetric property is<br />
destroyed for the decoupled model:<br />
<br />
u<br />
w<br />
q<br />
Ivar Ihle – TTK4190 Spring 2006






![Diagnosis and FTC by Prof. Blanke [pdf] - NTNU](https://img.yumpu.com/12483948/1/190x245/diagnosis-and-ftc-by-prof-blanke-pdf-ntnu.jpg?quality=85)


