Exercise 1.pdf (solution)
Exercise 1.pdf (solution) Exercise 1.pdf (solution)
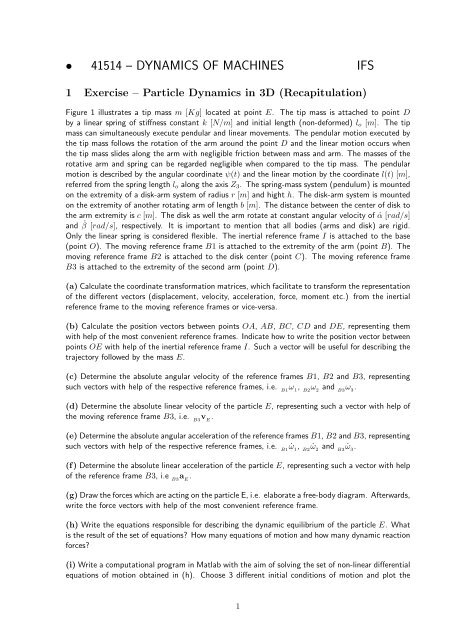
• 41514 – DYNAMICS OF MACHINES IFS 1 Exercise – Particle Dynamics in 3D (Recapitulation) Figure 1 illustrates a tip mass m [Kg] located at point E. The tip mass is attached to point D by a linear spring of stiffness constant k [N/m] and initial length (non-deformed) lo [m]. The tip mass can simultaneously execute pendular and linear movements. The pendular motion executed by the tip mass follows the rotation of the arm around the point D and the linear motion occurs when the tip mass slides along the arm with negligible friction between mass and arm. The masses of the rotative arm and spring can be regarded negligible when compared to the tip mass. The pendular motion is described by the angular coordinate ψ(t) and the linear motion by the coordinate l(t) [m], referred from the spring length lo along the axis Z3. The spring-mass system (pendulum) is mounted on the extremity of a disk-arm system of radius r [m] and hight h. The disk-arm system is mounted on the extremity of another rotating arm of length b [m]. The distance between the center of disk to the arm extremity is c [m]. The disk as well the arm rotate at constant angular velocity of ˙α [rad/s] and ˙ β [rad/s], respectively. It is important to mention that all bodies (arms and disk) are rigid. Only the linear spring is considered flexible. The inertial reference frame I is attached to the base (point O). The moving reference frame B1 is attached to the extremity of the arm (point B). The moving reference frame B2 is attached to the disk center (point C). The moving reference frame B3 is attached to the extremity of the second arm (point D). (a)Calculatethecoordinatetransformationmatrices, whichfacilitatetotransformtherepresentation of the different vectors (displacement, velocity, acceleration, force, moment etc.) from the inertial reference frame to the moving reference frames or vice-versa. (b) Calculate the position vectors between points OA, AB, BC, CD and DE, representing them with help of the most convenient reference frames. Indicate how to write the position vector between points OE with help of the inertial reference frame I. Such a vector will be useful for describing the trajectory followed by the mass E. (c) Determine the absolute angular velocity of the reference frames B1, B2 and B3, representing such vectors with help of the respective reference frames, i.e. B1 ω 1 , B2 ω 2 and B3 ω 3 . (d) Determine the absolute linear velocity of the particle E, representing such a vector with help of the moving reference frame B3, i.e. B3 v E . (e)DeterminetheabsoluteangularaccelerationofthereferenceframesB1, B2andB3, representing such vectors with help of the respective reference frames, i.e. B1 ˙ω 1 , B2 ˙ω 2 and B3 ˙ω 3 . (f) Determine the absolute linear acceleration of the particle E, representing such a vector with help of the reference frame B3, i.e B3 a E . (g)DrawtheforceswhichareactingontheparticleE,i.e. elaborateafree-bodydiagram. Afterwards, write the force vectors with help of the most convenient reference frame. (h) Write the equations responsible for describing the dynamic equilibrium of the particle E. What is the result of the set of equations? How many equations of motion and how many dynamic reaction forces? (i) Write a computational program in Matlab with the aim of solving the set of non-linear differential equations of motion obtained in (h). Choose 3 different initial conditions of motion and plot the 1
- Page 2 and 3: variables l(t) and ψ(t) as a funct
- Page 4 and 5: Third rotation around the X2-axis o
- Page 6 and 7: = i 1 j 1 k 1 0 0 ˙α 0 b 0
- Page 8 and 9: problem was formulated. (f) Absolut
- Page 10 and 11: B3 B3P = • (V) B3 a rel = ⎧ ⎨
- Page 12 and 13: % defining the position vectors wit
- Page 14: xlabel(’x [m]’) ylabel(’y [m]
• 41514 – DYNAMICS OF MACHINES IFS<br />
1 <strong>Exercise</strong> – Particle Dynamics in 3D (Recapitulation)<br />
Figure 1 illustrates a tip mass m [Kg] located at point E. The tip mass is attached to point D<br />
by a linear spring of stiffness constant k [N/m] and initial length (non-deformed) lo [m]. The tip<br />
mass can simultaneously execute pendular and linear movements. The pendular motion executed by<br />
the tip mass follows the rotation of the arm around the point D and the linear motion occurs when<br />
the tip mass slides along the arm with negligible friction between mass and arm. The masses of the<br />
rotative arm and spring can be regarded negligible when compared to the tip mass. The pendular<br />
motion is described by the angular coordinate ψ(t) and the linear motion by the coordinate l(t) [m],<br />
referred from the spring length lo along the axis Z3. The spring-mass system (pendulum) is mounted<br />
on the extremity of a disk-arm system of radius r [m] and hight h. The disk-arm system is mounted<br />
on the extremity of another rotating arm of length b [m]. The distance between the center of disk to<br />
the arm extremity is c [m]. The disk as well the arm rotate at constant angular velocity of ˙α [rad/s]<br />
and ˙ β [rad/s], respectively. It is important to mention that all bodies (arms and disk) are rigid.<br />
Only the linear spring is considered flexible. The inertial reference frame I is attached to the base<br />
(point O). The moving reference frame B1 is attached to the extremity of the arm (point B). The<br />
moving reference frame B2 is attached to the disk center (point C). The moving reference frame<br />
B3 is attached to the extremity of the second arm (point D).<br />
(a)Calculatethecoordinatetransformationmatrices, whichfacilitatetotransformtherepresentation<br />
of the different vectors (displacement, velocity, acceleration, force, moment etc.) from the inertial<br />
reference frame to the moving reference frames or vice-versa.<br />
(b) Calculate the position vectors between points OA, AB, BC, CD and DE, representing them<br />
with help of the most convenient reference frames. Indicate how to write the position vector between<br />
points OE with help of the inertial reference frame I. Such a vector will be useful for describing the<br />
trajectory followed by the mass E.<br />
(c) Determine the absolute angular velocity of the reference frames B1, B2 and B3, representing<br />
such vectors with help of the respective reference frames, i.e. B1 ω 1 , B2 ω 2 and B3 ω 3 .<br />
(d) Determine the absolute linear velocity of the particle E, representing such a vector with help of<br />
the moving reference frame B3, i.e. B3 v E .<br />
(e)DeterminetheabsoluteangularaccelerationofthereferenceframesB1, B2andB3, representing<br />
such vectors with help of the respective reference frames, i.e. B1 ˙ω 1 , B2 ˙ω 2 and B3 ˙ω 3 .<br />
(f) Determine the absolute linear acceleration of the particle E, representing such a vector with help<br />
of the reference frame B3, i.e B3 a E .<br />
(g)DrawtheforceswhichareactingontheparticleE,i.e. elaborateafree-bodydiagram. Afterwards,<br />
write the force vectors with help of the most convenient reference frame.<br />
(h) Write the equations responsible for describing the dynamic equilibrium of the particle E. What<br />
is the result of the set of equations? How many equations of motion and how many dynamic reaction<br />
forces?<br />
(i) Write a computational program in Matlab with the aim of solving the set of non-linear differential<br />
equations of motion obtained in (h). Choose 3 different initial conditions of motion and plot the<br />
1
variables l(t) and ψ(t) as a function of time. Plot the trajectory of the particle for the different initial<br />
conditions. Plot the dynamic reaction force as a function of time for the 3 different initial conditions.<br />
Figure1: Spring-mass system (pendulum) attached to the rotating reference frame B3 performing<br />
three consecutive rotations.<br />
2
SOLUTION:<br />
(a) Coordinate transformation matrices.<br />
First rotation around the Z-axis of inertial reference<br />
frame.<br />
Second rotation around the Z1-axis of the moving<br />
reference frame B1.<br />
3<br />
• Coordinate transformation matrices between<br />
I and B1:<br />
⎡ ⎤<br />
cosα sinα 0<br />
Tα = ⎣ −sinα cosα 0 ⎦<br />
0 0 1<br />
B1 s = Tα · I s<br />
I s = TT α · B1 s<br />
• Coordinate transformation matrices between<br />
B1 and B2:<br />
⎡ ⎤<br />
cosβ sinβ 0<br />
Tβ = ⎣ −sinβ cosβ 0 ⎦<br />
0 0 1<br />
B2 s = Tβ · B1 s<br />
B1 s = TT β · B2 s
Third rotation around the X2-axis of the moving<br />
reference frame B2.<br />
(b) Position vectors.<br />
• position vector I r OA :<br />
IrOA = 0 0 a ⎧ ⎫<br />
⎨ 0 ⎬<br />
T<br />
= 0<br />
⎩ ⎭<br />
a<br />
• position vector B1 r AB :<br />
B1 r AB = 0 b 0 T<br />
• position vector B2 r BC :<br />
B2 r BC = 0 0 c T<br />
• position vector B2 r CD :<br />
B2 r CD = 0 r h T<br />
• position vector B3 r DE :<br />
B3 r DE = 0 0 −(l0 +l) T<br />
• Coordinate transformation matrices between<br />
B2 and B3:<br />
⎡<br />
Tψ = ⎣<br />
B3 s = Tψ · B2 s<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
B2 s = TT ψ · B3 s<br />
The position vectors were written with help of the most convenient reference frames, it means using<br />
the reference frame in which their representation are the most compact one. For describing the<br />
particle trajectory is necessary to write the vector I r OE , i.e.<br />
I r OE = I r OA + I r AB + I r BC + I r CD + I r DE<br />
4<br />
⎤<br />
⎦
or<br />
I r OE = I r OA +TT α · B1 r AB +T T α · T T β · ( B2 r BC + B2 r CD )+TT α · T T β · TT ψ · B3 r DE<br />
(c) Absolute angular velocity of the moving reference frames.<br />
• Absolute angular velocity of the moving reference frame B1:<br />
B1ω1 = Tα<br />
⎡ ⎤⎧<br />
⎫<br />
cosα sinα 0 ⎨ 0 ⎬<br />
I ˙α = ⎣ −sinα cosα 0 ⎦ 0<br />
⎩ ⎭<br />
0 0 1 ˙α<br />
⇒B1 ω1 =<br />
⎧ ⎫<br />
⎨ 0 ⎬<br />
0<br />
⎩ ⎭<br />
˙α<br />
[rad/s]<br />
• Absolute angular velocity of the moving reference frame B2:<br />
B2 ω 2 = TβTα I ˙α+Tβ B1 ˙ β =<br />
⎡<br />
= ⎣<br />
B2 ω 2 =<br />
cos(α+β) sin(α+β) 0<br />
−sin(α+β) cos(α+β) 0<br />
0 0 1<br />
⎧<br />
⎨<br />
⎩<br />
0<br />
0<br />
˙α+ ˙ β<br />
⎫<br />
⎬<br />
⎭ [rad/s]<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
0<br />
0<br />
˙α<br />
⎫<br />
⎬<br />
⎭ +<br />
⎡<br />
⎣<br />
cosβ sinβ 0<br />
−sinβ cosβ 0<br />
0 0 1<br />
• Absolute angular velocity of the moving reference frame B3:<br />
B3 ω 3 = TψTβTα I ˙α+TψTβ B1 ˙ β +Tψ B2 ˙ ψ<br />
= Tψ( B2 ω 2 + B2 ˙ ψ) =<br />
⎡<br />
⎣<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
(d) Absolute linear velocity of the particle E.<br />
• Absolute linear velocity of point B<br />
B1 v B = B1 ω 1 × B1 r AB<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
0<br />
0<br />
˙β<br />
⎫<br />
⎬<br />
⎭<br />
˙ψ<br />
0<br />
˙α+ ˙ ⎫<br />
⎬<br />
⎭<br />
β<br />
=<br />
⎧<br />
⎨ ˙ψ<br />
(˙α+<br />
⎩<br />
˙ β)sinψ<br />
(˙α+ ˙ ⎫<br />
⎬<br />
⎭<br />
β)cosψ<br />
[rad/s]<br />
5
= <br />
<br />
<br />
i 1 j 1 k 1<br />
0 0 ˙α<br />
0 b 0<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
−b˙α<br />
0<br />
0<br />
⎫<br />
⎬<br />
⎭ [rad/s]<br />
•Absolute linear velocity of point C<br />
B1 v C = B1 v B ⇒ B2 v C = Tβ B1 v B<br />
⎡<br />
= ⎣<br />
cosβ sinβ 0<br />
−sinβ cosβ 0<br />
0 0 1<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
−b˙α<br />
0<br />
0<br />
•Absolute linear velocity of point D<br />
B2vD = B2 vC + B2 ω2 × B2 rCD + B2vrel <br />
=0<br />
⎧<br />
⎨<br />
=<br />
⎩<br />
−b˙αcosβ<br />
b˙αsinβ<br />
0<br />
⎫<br />
⎬<br />
⎭ +<br />
<br />
<br />
<br />
<br />
<br />
<br />
i 2 j 2 k 2<br />
0 0 ˙α+ ˙ β<br />
0 r h<br />
•Absolute linear velocity of the particle E<br />
B3vE = B3vD + B3ω3 × B3 rDE • (I)<br />
<br />
I<br />
B3 v D = Tψ B2 v D<br />
B3 v D =<br />
• (II)<br />
⎡<br />
⎣<br />
B3 ω 3 × B3 r DE<br />
<br />
II<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
⎫<br />
⎬<br />
⎭ ⇒B2 vC =<br />
⎧<br />
⎨<br />
⎩<br />
+ B3 v rel<br />
<br />
III<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
−b˙αcosβ<br />
b˙αsinβ<br />
0<br />
⎫<br />
⎬<br />
−b˙αcosβ −r(˙α+ ˙ β)<br />
b˙αsinβ<br />
0<br />
−b˙αcosβ −r(˙α+ ˙ β)<br />
b˙αsinβ<br />
0<br />
6<br />
⎫<br />
⎬<br />
⎭ =<br />
⎧<br />
⎨<br />
⎩<br />
⎭ [m/s]<br />
⎫<br />
⎬<br />
⎭ [m/s]<br />
−b˙αcosβ −r(˙α+ ˙ β)<br />
b˙αsinβcosψ<br />
−b˙αsinβsinψ<br />
⎫<br />
⎬<br />
⎭ [m/s]
= <br />
<br />
<br />
i 3 j 3 k 3<br />
˙ψ (˙α+ ˙ β)sinψ (˙α+ ˙ β)cosψ<br />
0 0 −(l0 +l)<br />
• (III)<br />
B1 v rel =<br />
⎧<br />
⎨<br />
⎩<br />
0<br />
0<br />
− ˙ l<br />
⎫<br />
⎬<br />
⎭<br />
• (I)+(II)+(III)<br />
B3 v E =<br />
⎧<br />
⎨<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
−(l0 +l)(˙α+ ˙ β)sinψ<br />
(l0 +l) ˙ ψ<br />
0<br />
−b˙αcosβ −r(˙α+ ˙ β)−(l0 +l)(˙α+ ˙ β)sinψ<br />
b˙αsinβcosψ +(l0 +l) ˙ ψ<br />
−b˙αsinβsinψ − ˙ l<br />
⎫<br />
⎬<br />
⎭ [m/s]<br />
(e) Absolute angular acceleration of the moving reference frames.<br />
• Absolute angular acceleration of the moving reference frame B1:<br />
B1 ˙ω d<br />
1 =<br />
dt ( B1ω1 )+ B1ω1 × B1 ω ⎧ ⎫<br />
⎨ 0 ⎬<br />
1 = 0<br />
⎩ ⎭<br />
=0 ¨α<br />
⇒B1 ˙ω 1 =<br />
⎧ ⎫<br />
⎨ 0 ⎬<br />
0<br />
⎩ ⎭<br />
0<br />
[rad/s2 ]<br />
• Absolute angular acceleration of the moving reference frame B2:<br />
B2 ˙ω d<br />
2 =<br />
dt ( B2ω2 )+ B2ω2 × B2 ω ⎧<br />
⎨ 0<br />
2 = 0<br />
⎩<br />
=0 ¨α+ ¨ ⎫<br />
⎬<br />
⎭<br />
β<br />
⇒B2 ˙ω 2 =<br />
⎧ ⎫<br />
⎨ 0 ⎬<br />
0<br />
⎩ ⎭<br />
0<br />
[rad/s2 ]<br />
• Absolute angular acceleration of the moving reference frame B3:<br />
B3 ˙ω 3<br />
B3 ˙ω 3 =<br />
d<br />
=<br />
dt ( B3ω3 )+ B3ω3 × B3 ω3 =<br />
<br />
=0<br />
⎧<br />
⎨<br />
⎩<br />
¨ψ<br />
(¨α+ ¨ β)sinψ +(˙α+ ˙ β) ˙ ψcosψ<br />
(¨α+ ¨ β)cosψ −(˙α+ ˙ β) ˙ ψsinψ<br />
⎫<br />
⎬<br />
⎫<br />
⎬<br />
⎭ ⇒B3 ˙ω 3 =<br />
⎧<br />
⎨ ¨ψ<br />
(˙α+<br />
⎩<br />
˙ β) ˙ ψcosψ<br />
−(˙α+ ˙ β) ˙ ⎫<br />
⎬<br />
⎭<br />
ψsinψ<br />
[rad/s2 ]<br />
It is important to point out that ¨α = ¨ β = 0! It is given in the beginning of the example, when the<br />
7<br />
⎭
problem was formulated.<br />
(f) Absolute linear acceleration of the point B.<br />
B1aB = B1aO + B1ω1 ×( B1ω1 × B1rOB )+ B1 ˙ω 1 × B1rOB +2 · B1ω1 × B1vrel <br />
<br />
=0<br />
=0<br />
B1 ω 1 ×<br />
B1 a B =<br />
<br />
<br />
<br />
<br />
<br />
<br />
⎧<br />
⎨<br />
⎩<br />
i 1 j 1 k 1<br />
0 0 ˙α<br />
0 b a<br />
0<br />
−b˙α 2<br />
0<br />
⎫<br />
⎬<br />
<br />
<br />
<br />
<br />
<br />
=<br />
<br />
<br />
<br />
<br />
<br />
<br />
⎭ [m/s2 ]<br />
i 1 j 1 k 1<br />
0 0 ˙α<br />
−b˙α 0 0<br />
(g) Absolute linear acceleration of the point C.<br />
B1 a C = B1 a B ⇒ B2 a C = Tβ B1 a B<br />
⎡<br />
= ⎣<br />
cosβ sinβ 0<br />
−sinβ cosβ 0<br />
0 0 1<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
0<br />
−b˙α 2<br />
0<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨ 0<br />
−b˙α<br />
⎩<br />
2<br />
⎫<br />
⎬<br />
⎭<br />
0<br />
⎫<br />
⎬<br />
⎭ ⇒B2 aC =<br />
⎧<br />
⎨<br />
⎩<br />
(g) Absolute linear acceleration of the particle E.<br />
−b˙α 2 sinβ<br />
−b˙α 2 cosβ<br />
0<br />
⎫<br />
⎬<br />
⎭ [m/s2 ]<br />
<br />
=0<br />
B3aE = B3aD + B3ω3 × ( B3ω3 × B3rDE ) + B3 ˙ω 3 × B3rDE + 2 · B3ω3 × B3vrel <br />
(I) (II)<br />
(III)<br />
• (I)<br />
B2aD = B2aC <br />
see item (f)<br />
<br />
(IV)<br />
+ B1 a rel<br />
<br />
=0<br />
+ B3 a rel<br />
<br />
(V)<br />
+ B2ω2 × ( B2ω2 × B2rCD ) + B2 ˙ω 2 × B2rCD +2 · B2ω2 × B2vrel <br />
(VI)<br />
8<br />
<br />
=0<br />
<br />
=0<br />
+ B2 a rel<br />
<br />
=0
• (VI)<br />
B2 ω 2 ×<br />
<br />
<br />
<br />
<br />
<br />
<br />
⇒ B2 a D =<br />
i 2 j 2 k 2<br />
0 0 (˙α+ ˙ β)<br />
0 r h<br />
⎧<br />
⎨<br />
⎩<br />
B3 a D = Tψ B2 a D =<br />
B3 a D =<br />
• (II)<br />
B3 ω 3 ×<br />
<br />
<br />
<br />
⇒ <br />
<br />
<br />
⎧<br />
⎨<br />
<br />
<br />
<br />
<br />
<br />
<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
<br />
<br />
<br />
<br />
<br />
<br />
−b˙α 2 sinβ<br />
−b˙α 2 cosβ −r(˙α+ ˙ β) 2<br />
0<br />
⎡<br />
⎣<br />
i 2 j 2 k 2<br />
0 0 (˙α+ ˙ β)<br />
−r(˙α+ ˙ β) 0 0<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
⎫<br />
⎬<br />
−b˙α 2 sinβ<br />
−(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )cosψ<br />
(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )sinψ<br />
i 3 j 3 k 3<br />
˙ψ (˙α+ ˙ β)sinψ (˙α+ ˙ β)cosψ<br />
0 0 −(l0 +l)<br />
⎭ [rad/s2 ]<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
⎫<br />
⎬<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨ 0<br />
−r(˙α+<br />
⎩<br />
˙ β) 2<br />
⎫<br />
⎬<br />
⎭<br />
0<br />
−b˙α 2 sinβ<br />
−b˙α 2 cosβ −r(˙α+ ˙ β) 2<br />
0<br />
⎭ [rad/s2 ]<br />
<br />
<br />
<br />
<br />
<br />
=<br />
i 3 j 3 k 3<br />
˙ψ (˙α+ ˙ β)sinψ (˙α+ ˙ β)cosψ<br />
−(l0 +l)(˙α+ ˙ β)sinψ (l0 +l) ˙ ψ 0<br />
• (III)<br />
B3 ˙ω 3 × B3 r DE =<br />
2 ·<br />
• (IV)<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
i 3 j 3 k 3<br />
¨ψ (˙α+ ˙ β) ˙ ψcosψ −(˙α+ ˙ β) ˙ ψsinψ<br />
0 0 −(l0 +l)<br />
i 3 j 3 k 3<br />
˙ψ (˙α+ ˙ β)sinψ (˙α+ ˙ β)cosψ<br />
0 0 − ˙ l<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
−2 ˙ l(˙α+ ˙ β) ˙ ψsinψ<br />
2 ˙ l ˙ ψ<br />
0<br />
9<br />
⎫<br />
⎬<br />
⎭<br />
−(l0 +l) ˙ ψ(˙α+ ˙ β)cosψ<br />
−(l0 +l)(˙α+ ˙ β) 2 sinψcosψ<br />
(l0 +l)( ˙ ψ 2 +(˙α+ ˙ β) 2 sin 2 ψ)<br />
−(l0 +l)(˙α+ ˙ β) ˙ ψcosψ<br />
(l0 +l) ¨ ψ<br />
0<br />
⎫<br />
⎬<br />
⎭<br />
⎫<br />
⎬<br />
⎭<br />
⎫<br />
⎬<br />
⎭
B3<br />
B3P =<br />
• (V)<br />
B3 a rel =<br />
⎧<br />
⎨<br />
⎩<br />
0<br />
0<br />
− ¨ l<br />
⎫<br />
⎬<br />
⎭ [m/s2 ]<br />
Adding the terms determined in (I), (II), (III), (IV) and (V), one achieves the absolute linear acceleration<br />
of the particle E represented in the reference frame B3:<br />
B3 a E =<br />
⎧<br />
⎨<br />
⎩<br />
−b˙α 2 sinβ −2(l0 +l) ˙ ψ(˙α+ ˙ β)cosψ −2 ˙ l(˙α+ ˙ β)sinψ<br />
−(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )cosψ −(l0 +l)(˙α+ ˙ β) 2 sinψcosψ +(l0 +l) ¨ ψ +2 ˙ l ˙ ψ<br />
(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )sinψ +(l0 +l)( ˙ ψ 2 +(˙α+ ˙ β) 2 sin 2 ψ)− ¨ l<br />
(g) Free-body diagram of the particle E.<br />
⎫<br />
⎬<br />
⎭ [rad/s2 ]<br />
• Vector representation of the forces acting on the particle E :<br />
I P = 0 0 −mg T<br />
• Force in the direction of the pendulum rod<br />
B3 T = 0 0 kl T<br />
• Forces perpendicular to the pendulum rod:<br />
B3 R = −R 0 0 T<br />
(h) Dynamic equilibrium of the particle E according to the second Newton’s law:<br />
d<br />
F = TψTβTα<br />
<br />
dt (m I v E ) = TψTβTα( ˙m<br />
=0<br />
B3 F = m B3 a E = B3 R + B3 T+TψTβTα I P<br />
⎡<br />
⎣<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
⎤⎡<br />
⎦⎣<br />
cosβ sinβ 0<br />
−sinβ cosβ 0<br />
0 0 1<br />
I v E +m I a E )<br />
⎤⎡<br />
⎦⎣<br />
10<br />
cosα sinα 0<br />
−sinα cosα 0<br />
0 0 1<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
0<br />
⎫<br />
⎬<br />
0<br />
⎭<br />
−mg<br />
=<br />
⎧<br />
⎨ 0<br />
⎫<br />
⎬<br />
−mgsinψ<br />
⎩ ⎭<br />
−mgcosψ
⎧<br />
⎨<br />
⎩<br />
⎧<br />
⎨<br />
m<br />
⎩<br />
−R<br />
−mgsinψ<br />
−mgcosψ +kl<br />
⎫<br />
⎬<br />
⎭ =<br />
−b˙α 2 sinβ −2(l0 +l) ˙ ψ(˙α+ ˙ β)cosψ −2 ˙ l(˙α+ ˙ β)sinψ<br />
−(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )cosψ −(l0 +l)(˙α+ ˙ β) 2 sinψcosψ +(l0 +l) ¨ ψ +2 ˙ l ˙ ψ<br />
(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )sinψ +(l0 +l)( ˙ ψ 2 +(˙α+ ˙ β) 2 sin 2 ψ)− ¨ l<br />
The final result of the application of the second Newton’s law is the achievement of three equations,<br />
i.e. one for calculating the dynamic reaction forces R and two additional equations responsible for<br />
describing the movement of the particle E as a function of the time, ¨ ψ(t) and ¨ l(t).<br />
• Dynamic reaction force (direction X 3 ) :<br />
R = m(b˙α 2 sinβ +2(l0 +l) ˙ ψ(˙α+ ˙ β)cosψ +2 ˙ l(˙α+ ˙ β)sinψ)<br />
• Equations of motion for the particle E (directions Y 3 and Z 3 )<br />
¨ψ = − g<br />
(l0 +l) sinψ + (b˙α2 cosβ +r(˙α+ ˙ β) 2 )<br />
(l0 +l)<br />
cosψ +(˙α+ ˙ β) 2 sinψcosψ − 2˙ l ˙ ψ<br />
(l0 +l)<br />
¨ l = − k<br />
m l+gcosψ +[b˙α2 cosβ +r(˙α+ ˙ β) 2 ]sinψ +(l0 +l)[ ˙ ψ 2 +(˙α+ ˙ β) 2 sin 2 ψ]<br />
(i) Computational routine implemented using Matlab and numerical results.<br />
clear all close all<br />
% parameters of the mechanical system<br />
a = 0.05; % [m]<br />
b = 0.5; % [m]<br />
c = 0.05; % [m]<br />
r = 0.1; % [m]<br />
h = 0.20; % [m]<br />
lo= 0.1; % [m]<br />
m = 0.2; % [kg]<br />
k = 2000; % [N/m]<br />
g = 9.82; % [m/s^2]<br />
% initial conditions<br />
alfa(1) = 0 % [rad]<br />
beta(1) = 0 % [rad]<br />
alfad = 2*pi/2 % [rad/s]<br />
betad = 2*pi*4 % [rad/s]<br />
l(1) = 0.000; % [m]<br />
ld(1) = 0; % [m/s]<br />
psi(1) = pi/6; % [rad]<br />
psid(1) = 0; % [rad/s]<br />
11<br />
⎫<br />
⎬<br />
⎭
% defining the position vectors with respect to desired reference frames<br />
Iroa = [0; 0; a];<br />
B1rab = [0; b; 0];<br />
B2rbc = [0; 0; c];<br />
B2rcd = [0; r; h];<br />
B3rde = [0; 0; -(lo+l(1))];<br />
% defining the transformation matrices<br />
Talfa = [cos(alfa(1)) sin(alfa(1)) 0<br />
-sin(alfa(1)) cos(alfa(1)) 0<br />
0 0 1];<br />
Tbeta = [cos(beta(1)) sin(beta(1)) 0<br />
-sin(beta(1)) cos(beta(1)) 0<br />
0 0 1];<br />
Tpsi = [1 0 0<br />
0 cos(psi(1)) sin(psi(1));<br />
0 -sin(psi(1)) cos(psi(1))];<br />
% creating the position vector which describes mass m’s trajectory in the inertial frame<br />
roe = Iroa + Talfa’*B1rab + Talfa’*Tbeta’*(B2rbc+B2rcd) + Talfa’*Tbeta’*Tpsi’*B3rde;<br />
rx(1)= roe(1);<br />
ry(1)= roe(2);<br />
rz(1)= roe(3);<br />
% calculating the reaction force R represented in the X3 direction<br />
Reaction(1) = m*( b*alfad^2*sin(beta(1)) ...<br />
+ 2*(lo+l(1))*psid(1)*(alfad+betad)*cos(psi(1)) ...<br />
+ 2*ld(1)*(alfad+betad)*sin(psi(1)));<br />
% numerical <strong>solution</strong><br />
% time step<br />
deltaT = 0.00005;<br />
% number of integration points<br />
n_int = 60000;<br />
for i=2:n_int,<br />
%tempo=(i-2)*deltaT<br />
t_int(i-1) = (i-2)*deltaT;<br />
% accelerations<br />
psidd(i-1) = -g/(lo+l(i-1))*sin(psi(i-1)) + ...<br />
(b*alfad^2*cos(beta(i-1))+r*(alfad+betad)^2)/(lo+l(i-1))*cos(psi(i-1)) + ...<br />
(alfad+betad)^2*sin(psi(i-1))*cos(psi(i-1)) - ...<br />
2*ld(i-1)*psid(i-1)/(lo+l(i-1));<br />
ldd(i-1) = -k/m*l(i-1) ...<br />
+ (g*cos(psi(i-1))+(b*alfad^2*cos(beta(i-1))) ...<br />
+ r*(alfad+betad)^2)*sin(psi(i-1)) ...<br />
+ (lo+l(i-1))*(psid(i-1)^2+(alfad+betad)^2*sin(psi(i-1))^2);<br />
% velocities<br />
12
end<br />
alfa(i) = alfa(i-1) + alfad*deltaT;<br />
beta(i) = beta(i-1) + betad*deltaT;<br />
psid(i) = psid(i-1) + psidd(i-1)*deltaT;<br />
ld(i) = ld(i-1) + ldd(i-1)*deltaT;<br />
% displacements<br />
psi(i) = psi(i-1) + psid(i-1)*deltaT;<br />
l(i) = l(i-1) + ld(i-1)*deltaT;<br />
% reaction force<br />
Reaction(i) = m*( b*alfad^2*sin(beta(i)) ...<br />
+ 2*(lo+l(i))*psid(i)*(alfad+betad)*cos(psi(i)) ...<br />
- 2*ld(i)*(alfad+betad)*sin(psi(i)));<br />
% transformation matrices<br />
Talfa = [ cos(alfa(i)) sin(alfa(i)) 0<br />
-sin(alfa(i)) cos(alfa(i)) 0<br />
0 0 1];<br />
Tbeta = [ cos(beta(i)) sin(beta(i)) 0<br />
-sin(beta(i)) cos(beta(i)) 0<br />
0 0 1];<br />
Tpsi = [1 0 0<br />
0 cos(psi(i)) sin(psi(i))<br />
0 -sin(psi(i)) cos(psi(i))];<br />
% defining the position vectors with respect to desired reference frames<br />
Iroa = [0; 0; a];<br />
B1rab = [0; b; 0];<br />
B2rbc = [0; 0; c];<br />
B2rcd = [0; r; h];<br />
B3rde = [0; 0; -(lo+l(i))]; % observe that only B3rde is time dependent!<br />
% creating the position vector which describes mass m’s trajectory in the inertial frame<br />
roe = Iroa + Talfa’*B1rab + Talfa’*Tbeta’*(B2rbc+B2rcd) + Talfa’*Tbeta’*Tpsi’*B3rde;<br />
rx(i)= roe(1);<br />
ry(i)= roe(2);<br />
rz(i)= roe(3);<br />
nplot=n_int-1;<br />
figure(1)<br />
plot(t_int(1:nplot),l(1:nplot))<br />
grid<br />
xlabel(’time [s]’)<br />
ylabel(’l(t) [s]’)<br />
figure(2)<br />
plot(t_int(1:nplot),psi(1:nplot))<br />
grid<br />
xlabel(’time [s]’)<br />
ylabel(’\psi(t) [s]’)<br />
figure(3)<br />
plot3(rx,ry,rz)<br />
axis([-0.8 0.8 -0.8 0.8 0 0.4])<br />
13
xlabel(’x [m]’)<br />
ylabel(’y [m]’)<br />
zlabel(’z [m]’)<br />
grid<br />
figure(4)<br />
plot(t_int(1:nplot),Reaction(1:nplot))<br />
grid<br />
xlabel(’time [s]’)<br />
ylabel(’R(t) [N]’)<br />
Figure 1 illustrates the results obtained aided by the computational routine implemented using Matlab.<br />
(a)<br />
l(t) [s]<br />
0.04<br />
0.035<br />
0.03<br />
0.025<br />
0.02<br />
0.015<br />
0.01<br />
0.005<br />
0<br />
−0.005<br />
−0.01<br />
0 0.5 1 1.5<br />
time [s]<br />
2 2.5 3<br />
(c) (d)<br />
(b)<br />
ψ(t) [s]<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
0 0.5 1 1.5<br />
time [s]<br />
2 2.5 3<br />
Figure 2: (a) Angle ψ(t) as function of time; (b) displacement l(t) as function of time; (c)<br />
trajectory described by the particle E when the arm and the disk rotate with a constant angular<br />
velocity given in the Matlab routine; (d) reaction force R(t) as function of time.<br />
14


