Dynamics of Machines - Part II - IFS.pdf
Dynamics of Machines - Part II - IFS.pdf Dynamics of Machines - Part II - IFS.pdf
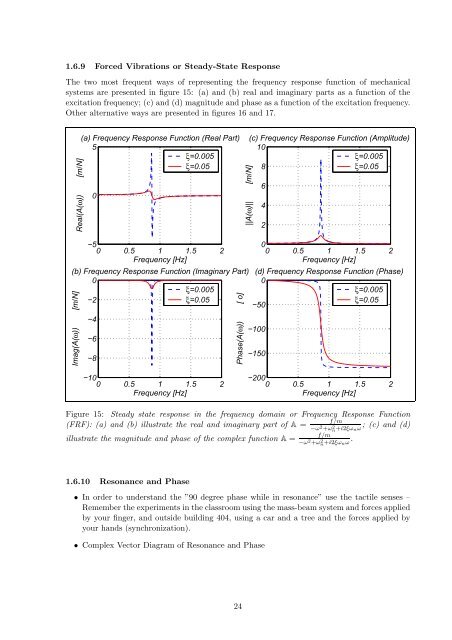
1.6.9 Forced Vibrations or Steady-State Response The two most frequent ways of representing the frequency response function of mechanical systems are presented in figure 15: (a) and (b) real and imaginary parts as a function of the excitation frequency; (c) and (d) magnitude and phase as a function of the excitation frequency. Other alternative ways are presented in figures 16 and 17. (a) Frequency Response Function (Real Part) 5 ξ=0.005 ξ=0.05 Real(A(ω)) [m/N] 0 −5 0 0.5 1 1.5 2 Frequency [Hz] (b) Frequency Response Function (Imaginary Part) 0 ξ=0.005 −2 ξ=0.05 Imag(A(ω)) [m/N] −4 −6 −8 −10 0 0.5 1 1.5 2 Frequency [Hz] Phase(A(ω)) [ o] (c) Frequency Response Function (Amplitude) 10 ξ=0.005 8 ξ=0.05 ||A(ω)|| [m/N] 6 4 2 −100 −150 0 0 0.5 1 1.5 2 Frequency [Hz] (d) Frequency Response Function (Phase) 0 −50 ξ=0.005 ξ=0.05 −200 0 0.5 1 1.5 2 Frequency [Hz] Figure 15: Steady state response in the frequency domain or Frequency Response Function f/m (FRF): (a) and (b) illustrate the real and imaginary part of A = −ω2 +ω2 n +i2ξωnω; (c) and (d) illustrate the magnitude and phase of the complex function A = 1.6.10 Resonance and Phase f/m −ω 2 +ω 2 n+i2ξωnω . • In order to understand the ”90 degree phase while in resonance” use the tactile senses – Remember the experiments in the classroom using the mass-beam system and forces applied by your finger, and outside building 404, using a car and a tree and the forces applied by your hands (synchronization). • Complex Vector Diagram of Resonance and Phase 24
Imag(A(ω)) [m/N] 0 −1 −2 −3 −4 −5 −6 −7 −8 Frequency Response Function (Real Part) ξ=0.005 ξ=0.05 −9 −5 −4 −3 −2 −1 0 1 2 3 4 5 Real(A(ω)) [m/N] Figure 16: Steady state response in the frequency domain or Frequency Response Function (FRF) illustrated as the real versus the imaginary part of A = Imag(A(ω)) [m/N] 0 −0.5 −1 −1.5 −2 1 0.5 Real(A(ω)) [m/N] 0 Frequency Response Function −0.5 0 0.5 f/m −ω 2 +ω 2 n +i2ξωnω. 1 1.5 Frequency [Hz] 2 ξ=0.05 Figure 17: Steady state response in the frequency domain or Frequency Response Function (FRF) f/m illustrated in a 3D-plot: the real and imaginary parts of A = −ω2 +ω2 as a function of the n+i2ξωnω frequency. 25
- Page 1 and 2: DYNAMICS OF MACHINES 41614 PART I -
- Page 3 and 4: 1 Introduction to Dynamical Modelli
- Page 5 and 6: 1.3 Data of the Mechanical System
- Page 7 and 8: 1.5 Calculating Stiffness Matrices
- Page 9 and 10: 1.6 Mechanical Systems with 1 D.O.F
- Page 11 and 12: Demanding (λ 2 + 2ξωnλ + ω 2 n
- Page 13 and 14: 1 yini − A det λ1 vini − A C2
- Page 15 and 16: 1.6.4 Analytical and Numerical Solu
- Page 17 and 18: (a) y(t) [m] (b) y(t) [m] (c) y(t)
- Page 19 and 20: 1.6.6 Homogeneous Solution or Free-
- Page 21 and 22: (a) Amplitude [m/s 2 ] x Signal 10
- Page 23: (a) Amplitude [m/s 2 ] (b) Amplitud
- Page 27 and 28: 1.6.11 Superposition of Transient a
- Page 29 and 30: (a) Amplitude [m/s 2 ] (b) Amplitud
- Page 31 and 32: 1.7 Mechanical Systems with 2 D.O.F
- Page 33 and 34: ⎧ ⎫ ⎪⎨ ˙y1(t) ⎪⎬ ˙y
- Page 35 and 36: zini = U c + A ⇒ c = U −1 {(zin
- Page 37 and 38: 1.7.4 Modal Analysis using Matlab e
- Page 39 and 40: 0.7 0.6 0.5 0.4 0.3 0.2 0.1 First M
- Page 41 and 42: %__________________________________
- Page 43 and 44: ||y 1 (ω)|| [m/N] Phase [ o] Excit
- Page 45 and 46: ||y i (ω)|| [m/N] Phase [ o] 0.8 0
- Page 47 and 48: Imag(y i (ω)/f 1 (ω)) (i=1,2) [m/
- Page 49 and 50: 1.8 Mechanical Systems with 3 D.O.F
- Page 51 and 52: which could be verified using Modal
- Page 53 and 54: %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
- Page 55 and 56: 1.8.4 Theoretical Frequency Respons
- Page 57 and 58: (a) Amplitude [m/s 2 ] (b) Amplitud
- Page 59 and 60: 4. Vary the number of masses attach
- Page 61 and 62: 1.10 Project 0 - Identification of
- Page 63 and 64: (a) (b) REAL(Acc/force) [(m/s 2 )/N
- Page 65 and 66: 6. Model application - As explained
- Page 67 and 68: changeable unbalanced mass for simu
- Page 69 and 70: %Modal Matrix u with mode shapes %M
- Page 71 and 72: acc [m/s 2 ] acc [m/s 2 ] 0.8 0.6 0
1.6.9 Forced Vibrations or Steady-State Response<br />
The two most frequent ways <strong>of</strong> representing the frequency response function <strong>of</strong> mechanical<br />
systems are presented in figure 15: (a) and (b) real and imaginary parts as a function <strong>of</strong> the<br />
excitation frequency; (c) and (d) magnitude and phase as a function <strong>of</strong> the excitation frequency.<br />
Other alternative ways are presented in figures 16 and 17.<br />
(a) Frequency Response Function (Real <strong>Part</strong>)<br />
5<br />
ξ=0.005<br />
ξ=0.05<br />
Real(A(ω)) [m/N]<br />
0<br />
−5<br />
0 0.5 1 1.5 2<br />
Frequency [Hz]<br />
(b) Frequency Response Function (Imaginary <strong>Part</strong>)<br />
0<br />
ξ=0.005<br />
−2<br />
ξ=0.05<br />
Imag(A(ω)) [m/N]<br />
−4<br />
−6<br />
−8<br />
−10<br />
0 0.5 1 1.5 2<br />
Frequency [Hz]<br />
Phase(A(ω)) [ o]<br />
(c) Frequency Response Function (Amplitude)<br />
10<br />
ξ=0.005<br />
8<br />
ξ=0.05<br />
||A(ω)|| [m/N]<br />
6<br />
4<br />
2<br />
−100<br />
−150<br />
0<br />
0 0.5 1 1.5 2<br />
Frequency [Hz]<br />
(d) Frequency Response Function (Phase)<br />
0<br />
−50<br />
ξ=0.005<br />
ξ=0.05<br />
−200<br />
0 0.5 1 1.5 2<br />
Frequency [Hz]<br />
Figure 15: Steady state response in the frequency domain or Frequency Response Function<br />
f/m<br />
(FRF): (a) and (b) illustrate the real and imaginary part <strong>of</strong> A = −ω2 +ω2 n +i2ξωnω; (c) and (d)<br />
illustrate the magnitude and phase <strong>of</strong> the complex function A =<br />
1.6.10 Resonance and Phase<br />
f/m<br />
−ω 2 +ω 2 n+i2ξωnω .<br />
• In order to understand the ”90 degree phase while in resonance” use the tactile senses –<br />
Remember the experiments in the classroom using the mass-beam system and forces applied<br />
by your finger, and outside building 404, using a car and a tree and the forces applied by<br />
your hands (synchronization).<br />
• Complex Vector Diagram <strong>of</strong> Resonance and Phase<br />
24


