

Dynamics of Machines - Part II - IFS.pdf
Dynamics of Machines - Part II - IFS.pdf
Dynamics of Machines - Part II - IFS.pdf

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
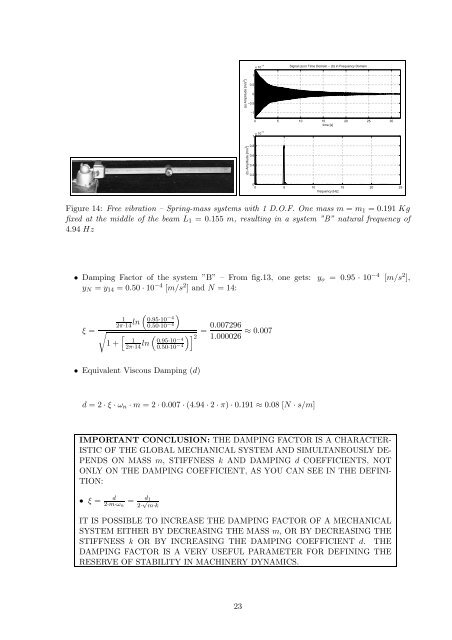
(a) Amplitude [m/s 2 ]<br />
(b) Amplitude [m/s 2 ]<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
x 10 −4 Signal (a) in Time Domain − (b) in Frequency Domain<br />
0 5 10 15<br />
time [s]<br />
20 25 30<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
x 10−5<br />
1<br />
0<br />
0 5 10 15 20 25<br />
frequency [Hz]<br />
Figure 14: Free vibration – Spring-mass systems with 1 D.O.F. One mass m = m1 = 0.191 Kg<br />
fixed at the middle <strong>of</strong> the beam L1 = 0.155 m, resulting in a system ”B” natural frequency <strong>of</strong><br />
4.94 Hz<br />
• Damping Factor <strong>of</strong> the system ”B” – From fig.13, one gets: yo = 0.95 · 10 −4 [m/s 2 ],<br />
yN = y14 = 0.50 · 10 −4 [m/s 2 ] and N = 14:<br />
ξ = <br />
1 +<br />
1<br />
2π·14 ln<br />
1<br />
2π·14 ln<br />
0.95·10 −4<br />
0.50·10 −4<br />
<br />
0.95·10 −4<br />
0.50·10 −4<br />
• Equivalent Viscous Damping (d)<br />
<br />
=<br />
2 0.007296<br />
≈ 0.007<br />
1.000026<br />
d = 2 · ξ · ωn · m = 2 · 0.007 · (4.94 · 2 · π) · 0.191 ≈ 0.08 [N · s/m]<br />
IMPORTANT CONCLUSION: THE DAMPING FACTOR IS A CHARACTER-<br />
ISTIC OF THE GLOBAL MECHANICAL SYSTEM AND SIMULTANEOUSLY DE-<br />
PENDS ON MASS m, STIFFNESS k AND DAMPING d COEFFICIENTS, NOT<br />
ONLY ON THE DAMPING COEFFICIENT, AS YOU CAN SEE IN THE DEFINI-<br />
TION:<br />
• ξ = d<br />
2·m·ωn<br />
= d1<br />
2· √ m·k<br />
IT IS POSSIBLE TO INCREASE THE DAMPING FACTOR OF A MECHANICAL<br />
SYSTEM EITHER BY DECREASING THE MASS m, OR BY DECREASING THE<br />
STIFFNESS k OR BY INCREASING THE DAMPING COEFFICIENT d. THE<br />
DAMPING FACTOR IS A VERY USEFUL PARAMETER FOR DEFINING THE<br />
RESERVE OF STABILITY IN MACHINERY DYNAMICS.<br />
23













