NONLINEAR CONTROLLER COMPARISON ON A BENCHMARK ...
NONLINEAR CONTROLLER COMPARISON ON A BENCHMARK ... NONLINEAR CONTROLLER COMPARISON ON A BENCHMARK ...
Response in cm Response in cm 5 4 3 2 1 0 −1 −2 −3 Backstepping Linearized Robust −4 0 1 2 3 4 5 Time 6 7 8 9 10 5 4 3 2 1 0 −1 −2 −3 Figure 4.11: Backstepping vs. Linear Robust Control Backstepping Passivity Based −4 0 1 2 3 4 5 Time 6 7 8 9 10 Figure 4.12: Backstepping vs. Passivity Based Control 38
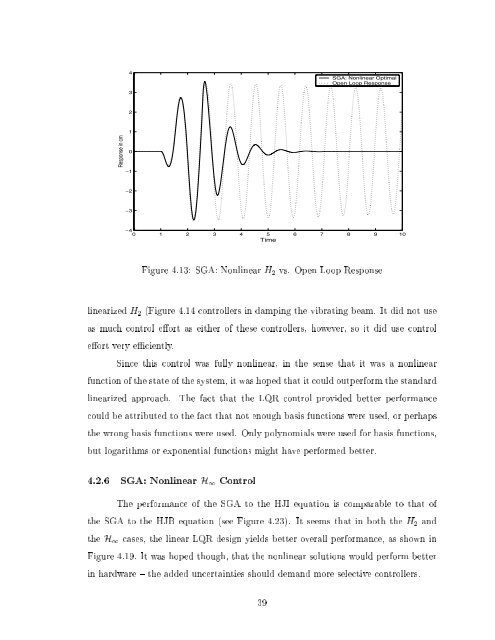
Response in cm 4 3 2 1 0 −1 −2 −3 SGA: Nonlinear Optimal Open Loop Response −4 0 1 2 3 4 5 Time 6 7 8 9 10 Figure 4.13: SGA: Nonlinear H 2 vs. Open Loop Response linearized H 2 (Figure 4.14 controllers in damping the vibrating beam. It did not use as much control e ort as either of these controllers, however, so it did use control e ort very e ciently. Since this control was fully nonlinear, in the sense that it was a nonlinear function of the state of the system, it was hoped that it could outperform the standard linearized approach. The fact that the LQR control provided better performance could be attributed to the fact that not enough basis functions were used, or perhaps the wrong basis functions were used. Only polynomials were used for basis functions, but logarithms or exponential functions might have performed better. 4.2.6 SGA: Nonlinear H1 Control The performance of the SGA to the HJI equation is comparable to that of the SGA to the HJB equation (see Figure 4.23). It seems that in both the H 2 and the H1 cases, the linear LQR design yields better overall performance, as shown in Figure 4.19. It was hoped though, that the nonlinear solutions would perform better in hardware { the added uncertainties should demand more selective controllers. 39
- Page 1 and 2: NONLINEAR CONTROLLER COMPARISON ON
- Page 3 and 4: BRIGHAM YOUNG UNIVERSITY GRADUATE C
- Page 5 and 6: ABSTRACT NONLINEAR CONTROLLER COMPA
- Page 7 and 8: Contents Acknowledgments vi List of
- Page 9: List of Tables 4.1 Tabular Comparis
- Page 12 and 13: 4.19 SGA: Nonlinear H1 vs. Linear O
- Page 14 and 15: Figure 1.1: TORA System One of the
- Page 16 and 17: 1.3 Literature Review In surveying
- Page 19 and 20: Chapter 2 Plant Speci cations and M
- Page 21 and 22: Figure 2.2: Mechanical Model of Fle
- Page 23 and 24: Figure 2.4: Translational Oscillati
- Page 25 and 26: 2.3 Software Set-up All of the cont
- Page 27 and 28: Chapter 3 Overview of Control Strat
- Page 29 and 30: The optimal gain matrix was given b
- Page 31 and 32: 3.3 Passivity-Based Control Certain
- Page 33 and 34: limitations, k 1 and k 2 are tuning
- Page 35 and 36: Now we regard as the control variab
- Page 37 and 38: where V satis es the well known Ham
- Page 39 and 40: ecause one can quickly adjust the Q
- Page 41 and 42: Chapter 4 Simulation Results 4.1 Th
- Page 43 and 44: disturbances, whereas the hardware
- Page 45 and 46: Response in cm 4 3 2 1 0 −1 −2
- Page 47 and 48: Response in cm Response in cm 4 3 2
- Page 49: Response in cm Response in cm 5 4 3
- Page 53 and 54: Response in cm Response in cm 4 3 2
- Page 55 and 56: Response in cm Response in cm 4 3 2
- Page 57 and 58: It is seen in Figure 4.23 that the
- Page 59: all of the physical parameters exce
- Page 62 and 63: Response in m 0.05 0.04 0.03 0.02 0
- Page 64 and 65: Response in m 0.05 0.04 0.03 0.02 0
- Page 66 and 67: Response in m Response in m 0.05 0.
- Page 68 and 69: Response in m Response in m 0.05 0.
- Page 70 and 71: Response in m Response in m 0.05 0.
- Page 72 and 73: control was that it requires only t
- Page 74 and 75: to the Galerkin approximation techn
- Page 77 and 78: Bibliography [1] P. Kokotovic M. Ja
Response in cm<br />
4<br />
3<br />
2<br />
1<br />
0<br />
−1<br />
−2<br />
−3<br />
SGA: Nonlinear Optimal<br />
Open Loop Response<br />
−4<br />
0 1 2 3 4 5<br />
Time<br />
6 7 8 9 10<br />
Figure 4.13: SGA: Nonlinear H 2 vs. Open Loop Response<br />
linearized H 2 (Figure 4.14 controllers in damping the vibrating beam. It did not use<br />
as much control e ort as either of these controllers, however, so it did use control<br />
e ort very e ciently.<br />
Since this control was fully nonlinear, in the sense that it was a nonlinear<br />
function of the state of the system, it was hoped that it could outperform the standard<br />
linearized approach. The fact that the LQR control provided better performance<br />
could be attributed to the fact that not enough basis functions were used, or perhaps<br />
the wrong basis functions were used. Only polynomials were used for basis functions,<br />
but logarithms or exponential functions might have performed better.<br />
4.2.6 SGA: Nonlinear H1 Control<br />
The performance of the SGA to the HJI equation is comparable to that of<br />
the SGA to the HJB equation (see Figure 4.23). It seems that in both the H 2 and<br />
the H1 cases, the linear LQR design yields better overall performance, as shown in<br />
Figure 4.19. It was hoped though, that the nonlinear solutions would perform better<br />
in hardware { the added uncertainties should demand more selective controllers.<br />
39


