

guidance, flight mechanics and trajectory optimization
guidance, flight mechanics and trajectory optimization
guidance, flight mechanics and trajectory optimization

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2.2.4 Impulsive Rendezvons Techniques<br />
-.. - ---I--.-----.<br />
Tn thi.s section, the development of <strong>guidance</strong> equations in a linear<br />
gravity field will be restricted to determining an impulsive velocity<br />
correction such that a rendezvous till take place at some time in the future.<br />
The techniques of this secti.on can be thought of as defining a reference<br />
<strong>trajectory</strong> along which the rendezvous vehicle is to travel. Once this<br />
reference <strong>trajectory</strong> has been established, the actual steering equatinns<br />
(i.e., orientation of the thrust vector as a function of time) can be<br />
determined by the methods discussed in a previous monnqraph of this series<br />
on boost-<strong>guidance</strong> equations (Reference 2.16). The section below gives a<br />
discussion of two simp3.e techniques for utilizing cal cu!.ated velocity impulses.<br />
Impulsive velocity changes have been considered in detail in the<br />
monograph on mi.dcourse <strong>guidance</strong> (Reference 2.15) <strong>and</strong> this reference is<br />
recommended for a more com@ete formulation including the effects of errors<br />
in data <strong>and</strong> <strong>optimization</strong> of mu!.ti.ple i.rnpulse schemes.<br />
2.2.4.1 Approximating Velocity Impulses<br />
The use of a model having a linear variation in gravity generates the<br />
necessity of neglecting the effects of finite bnrning time in order that<br />
closed form solutions be obtainable. Al though, th,e use of imp111 sT.ve<br />
ve3 ocity changes is essential to the simoV fication of the equ,ati ons, their<br />
physical realjzation can be only anproximate. If a true impulse could he<br />
achieved, then the <strong>guidance</strong> mechanization won!d simply be to orient the<br />
thrustor along the direction of the required vel.ocity chanece <strong>and</strong> apply an<br />
impulse equal to the magnitude of the required chance. Since th.e rocket<br />
motor must bllrn for a finite time (the length of t?me depends upon the<br />
thrust capability in relation to the magnitude of the velocity increment)<br />
the orientation of the required veloci.tg increment will., generally, nnt<br />
be the same at the initiation <strong>and</strong> termination of the thrusting period.<br />
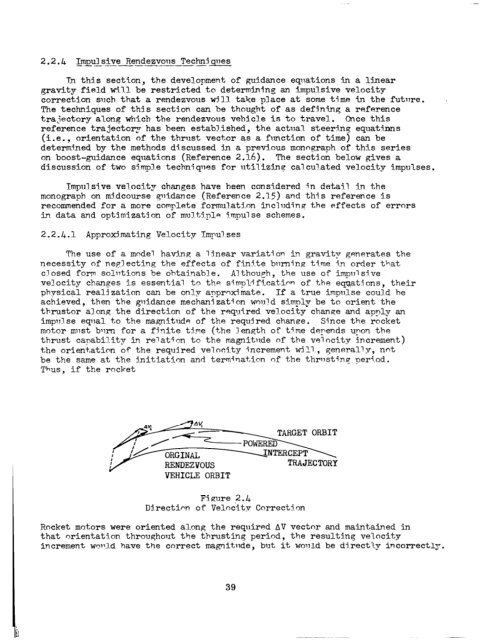
Thus, if the rocket<br />
v<br />
!ENDEZVOUS<br />
VEHICLE ORBIT<br />
Figure 2.4<br />
Di.rection of Velo&tp Correction<br />
TRAJECTORY<br />
Rocket motors were oriented along the required AV vector <strong>and</strong> maintained in<br />
that orientation throughout the thrusting period, the resulti.ng velocity<br />
increment wnnld have the correct magnitude, but it would be directly incorrectly.<br />
39













