P. Schmoldt, PhD - MTNet - DIAS
P. Schmoldt, PhD - MTNet - DIAS P. Schmoldt, PhD - MTNet - DIAS
4. Distortion of magnetotelluric data Fig. 4.4.: Magnetotelluric (MT) responses under the influence of static shift (electric galvanic distortion). The curve is subject to a constant shift for the whole frequency range of the mode with the electric component in direction of the distorting body (ρyx) compared to the orthogonal mode ρxy and the undistorted 1D response 1D; from Pellerin and Hohmann [1990]. lateral concentration of excess current concentration is dominant, whereas in the opposite case, when Λ is greater than the distorter’s horizontal extension, the vertical current gathering effect prevails [Jiracek, 1990]. For the case of a 3D distorting body the deviation of the electric current, hence the distortion characteristics, is dependent on the body’s extent in both lateral directions. Accordingly, a wide range of models exhibiting different geometry can be devised which yield similar adjustment distances, meaning that the problem is highly non-unique. In order to investigate the issue of galvanic distortion in more detail it is useful to subdivide it into its electric and magnetic components, since these affect the EM to a different degree (cf. Sec. 4.1). The current channelling effect, comprising a special case of galvanic distortion is discussed separately. Electric galvanic distortion Once periods are long in comparison to the depth extend of the distorting body, the effect of electric galvanic distortion is frequency independent, resulting in a constant shift of the apparent resistivity response curve at longer periods (Fig. 4.4). Accordingly, the effect of electric galvanic distortion on MT data is commonly referred to as static shift or Seffect (in Soviet literature) [e.g. Jones, 1988; Pellerin and Hohmann, 1990; Jiracek, 1990; Spitzer, 2006]. Electric galvanic distortion is often the prevalent effect in MT data, since inductive and magnetic galvanic distortion (Secs. 4.1.1, 4.1.2) are, in most cases, confined to a small frequency range, owing to their decreasing effect for longer frequency. Consequently numerous attempts to correct for electric galvanic distortion have been presented by various authors, concluding that MT data can be corrected for the effect of electric galvanic distortion when 54 • magnitude and phase of the regional response are known for at least one frequency [e.g. Berdichevsky et al., 1989; Chave and Smith, 1994],
J s 0 s 0 4.1. Types of distortion Fig. 4.5.: The principle of current channelling, denoting a deflection of the Electric current J by a highly conductive anomaly σ1 in a more resistive surrounding medium σ0; cf. Figure 4.3. • information about the resistivity structure of the subsurface is known from other methods like transient or time domain EM (TEM) [e.g. Andrieux and Wightman, 1984; Sternberg et al., 1988; Pellerin and Hohmann, 1990] or Geomagnetic Deep Sounding (GDS) [e.g. Wolfgram and Scharberth, 1986], • statistical approaches are used [e.g. Jones, 1988, and references within], or • distorting bodies are incorporated in the inversion process. Magnetic galvanic distortion The magnetic galvanic distortion effect is frequency dependent, and the decay of its magnitude is approximately proportional to √ T [Chave and Smith, 1994]. The magnetic galvanic distortion effect of a surficial body can therefore be considered negligible if the period is long compared to the depth extend of the distorting body [e.g. Groom and Bailey, 1989]. However, further magnetic galvanic effects can be caused by additional distorting bodies in the subsurface, affecting the frequency range that is related to the body’s location. Naturally, the magnetic galvanic effect of such bodies deteriorates in a similar way and becomes negligible again for periods that are comparatively long relatively to the dimension of these bodies [e.g. Garcia and Jones, 2001]. Multiple subsurface distorters at different depth ranges will therefore result in several magnetic galvanic distortion effects that are mostly confined to data of the period range related to the location of each distorter. Current channelling A special case of galvanic distortion is the channelling of electric currents into a 3D body of higher conductivity, following the orientation of the body, which provides the path of least resistance (Fig. 4.5). Even though this situation can be adequately described by electric and magnetic galvanic distortion, it is addressed in a separate paragraph owing to its distinct emergence in MT recordings. A thorough overview about the problem of current channelling was given by Jones [1983a]. Current channelling due to an elongated 3D distorter deflects parts of the electric current into a direction parallel to the orientation of the conductor, thus causing a deviation from the orthogonality of magnetic and electric field. Therefore, off-diagonal elements of the impedance tensor (Eq. 3.34), related to TE and TM mode, are decreased, whereas 55
- Page 39 and 40: ections from enhanced one-dimension
- Page 41: Part I Theoretical background of ma
- Page 44 and 45: 2. Sources for magnetotelluric reco
- Page 46 and 47: 2. Sources for magnetotelluric reco
- Page 48 and 49: 2. Sources for magnetotelluric reco
- Page 50 and 51: 2. Sources for magnetotelluric reco
- Page 52 and 53: 2. Sources for magnetotelluric reco
- Page 54 and 55: 2. Sources for magnetotelluric reco
- Page 56 and 57: 2. Sources for magnetotelluric reco
- Page 58 and 59: 2. Sources for magnetotelluric reco
- Page 60 and 61: 2. Sources for magnetotelluric reco
- Page 62 and 63: 2. Sources for magnetotelluric reco
- Page 64 and 65: 2. Sources for magnetotelluric reco
- Page 67 and 68: Mathematical description of electro
- Page 69 and 70: yields 3.2. Deriving magnetotelluri
- Page 71 and 72: 3.2. Deriving magnetotelluric param
- Page 73 and 74: 3.3. Magnetotelluric induction area
- Page 75 and 76: Depth d s d 1 d 2 d n-2 d n-1 t 1 t
- Page 77 and 78: 3.4. Boundary conditions materials
- Page 79 and 80: 3.5. The influence of electric perm
- Page 81 and 82: 3.5. The influence of electric perm
- Page 83 and 84: 3.5. The influence of electric perm
- Page 85 and 86: Distortion of magnetotelluric data
- Page 87 and 88: 4.1. Types of distortion Fig. 4.1.:
- Page 89: 4.1. Types of distortion Fig. 4.3.:
- Page 93 and 94: 4.1. Types of distortion Fig. 4.7.:
- Page 95 and 96: Scale Type Terminology Example Atom
- Page 97 and 98: 4.1. Types of distortion the use of
- Page 99 and 100: 4.2. Dimensionality Fig. 4.12.: The
- Page 101 and 102: 1D 2D local 3D/1D 3D/2D regional 4.
- Page 103 and 104: 4.3. General mathematical represent
- Page 105 and 106: 4.4. Removal of distortion effects
- Page 107 and 108: Parameter Geoelectrical application
- Page 109 and 110: 4.4. Removal of distortion effects
- Page 111 and 112: 4.4.5. Caldwell-Bibby-Brown phase t
- Page 113 and 114: 4.4. Removal of distortion effects
- Page 115: Method Applicability Swift angle 2D
- Page 118 and 119: 5. Earth’s properties observable
- Page 120 and 121: 5. Earth’s properties observable
- Page 122 and 123: 5. Earth’s properties observable
- Page 124 and 125: 5. Earth’s properties observable
- Page 126 and 127: 5. Earth’s properties observable
- Page 128 and 129: 5. Earth’s properties observable
- Page 130 and 131: 5. Earth’s properties observable
- Page 132 and 133: 5. Earth’s properties observable
- Page 134 and 135: 5. Earth’s properties observable
- Page 136 and 137: 5. Earth’s properties observable
- Page 138 and 139: 5. Earth’s properties observable
4. Distortion of magnetotelluric data<br />
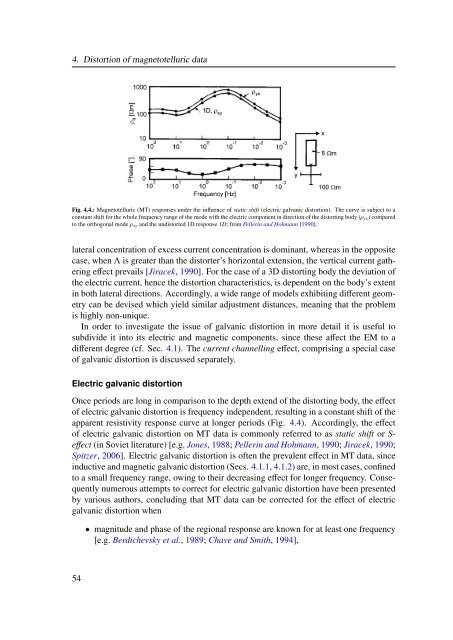
Fig. 4.4.: Magnetotelluric (MT) responses under the influence of static shift (electric galvanic distortion). The curve is subject to a<br />
constant shift for the whole frequency range of the mode with the electric component in direction of the distorting body (ρyx) compared<br />
to the orthogonal mode ρxy and the undistorted 1D response 1D; from Pellerin and Hohmann [1990].<br />
lateral concentration of excess current concentration is dominant, whereas in the opposite<br />
case, when Λ is greater than the distorter’s horizontal extension, the vertical current gathering<br />
effect prevails [Jiracek, 1990]. For the case of a 3D distorting body the deviation of<br />
the electric current, hence the distortion characteristics, is dependent on the body’s extent<br />
in both lateral directions. Accordingly, a wide range of models exhibiting different geometry<br />
can be devised which yield similar adjustment distances, meaning that the problem<br />
is highly non-unique.<br />
In order to investigate the issue of galvanic distortion in more detail it is useful to<br />
subdivide it into its electric and magnetic components, since these affect the EM to a<br />
different degree (cf. Sec. 4.1). The current channelling effect, comprising a special case<br />
of galvanic distortion is discussed separately.<br />
Electric galvanic distortion<br />
Once periods are long in comparison to the depth extend of the distorting body, the effect<br />
of electric galvanic distortion is frequency independent, resulting in a constant shift of the<br />
apparent resistivity response curve at longer periods (Fig. 4.4). Accordingly, the effect<br />
of electric galvanic distortion on MT data is commonly referred to as static shift or Seffect<br />
(in Soviet literature) [e.g. Jones, 1988; Pellerin and Hohmann, 1990; Jiracek, 1990;<br />
Spitzer, 2006]. Electric galvanic distortion is often the prevalent effect in MT data, since<br />
inductive and magnetic galvanic distortion (Secs. 4.1.1, 4.1.2) are, in most cases, confined<br />
to a small frequency range, owing to their decreasing effect for longer frequency. Consequently<br />
numerous attempts to correct for electric galvanic distortion have been presented<br />
by various authors, concluding that MT data can be corrected for the effect of electric<br />
galvanic distortion when<br />
54<br />
• magnitude and phase of the regional response are known for at least one frequency<br />
[e.g. Berdichevsky et al., 1989; Chave and Smith, 1994],


