CONTROL SYSTEMS II (REGELSYSTEME II) PROBLEM SET 6
CONTROL SYSTEMS II (REGELSYSTEME II) PROBLEM SET 6
CONTROL SYSTEMS II (REGELSYSTEME II) PROBLEM SET 6

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Automatic Control Laboratory<br />
D-ITET<br />
Prof. Dr. Roy Smith Spring Term 2013<br />
Objectives:<br />
<strong>CONTROL</strong> <strong>SYSTEMS</strong> <strong>II</strong> (<strong>REGELSYSTEME</strong> <strong>II</strong>)<br />
• Introduction to Linear Systems Theory<br />
Background: Skogestad Chapter 4<br />
Testat: 3 out of 4<br />
<strong>PROBLEM</strong> <strong>SET</strong> 6<br />
Exercise 1 State-Space Representation and Transfer Functions<br />
Obtain a state space realization for the following systems that are described through the transfer functions:<br />
1.<br />
2.<br />
3.<br />
Use a first order Padé approximation, i.e.,<br />
G(s) =<br />
G(s) =<br />
τ1s+1<br />
s 2 +2ζωns+ω 2 n<br />
τ1s−1<br />
s 2 +2ζωns+ω 2 n<br />
G(s) = e−τ ds<br />
τ1s+1<br />
e −τ ds = 1− τ d<br />
2 s<br />
1+ τ d<br />
2 s<br />
Verify the transformations from the transfer function to the state space descriptions in MATLAB, using the ss2tf function<br />
with the following parameters, respectively:<br />
1.<br />
2.<br />
3.<br />
τ1 = 1,ζ = 0.8,ωn = 2<br />
τ1 = 1,ζ = 0.8,ωn = 2<br />
τd = 1,τ1 = 3<br />
Exercise 2 Stability of periodically switched systems<br />
Consider a system whose behaviour periodically switches between two different system models<br />
G1 =<br />
<br />
A1<br />
<br />
B1<br />
, k ≤ t < k +d, d ∈ (0,1)<br />
and<br />
G2 =<br />
C1 D1<br />
A2 B2<br />
C2 D2<br />
<br />
, k +d ≤ t < k +1,<br />
where, k = 0,1,2,..., and bothG1 andG2 are stable. Examine the stability of the complete system.<br />
1 of 3
Hint: Analytically, the equations of the system are given by<br />
and<br />
The solution of Eq. (1) from t = k tot = k +dis<br />
˙x(t) = A1x(t)+B1u(t) ,k t < k +d (1)<br />
y(t) = C1x(t)+D1u(t)<br />
˙x(t) = A2x(t)+B2u(t) ,k+d t < k +1 (2)<br />
y(t) = C2x(t)+D2u(t).<br />
x(k+d) = e A1d x(k)+<br />
k+d<br />
and the solution of Eq. (2) from t = k +dtot = k +1is given by<br />
x(k +1) = e A2(1−d) x(k +d)+<br />
k<br />
e A1(k+d−s) B1u(s)ds (3)<br />
k+1<br />
k+d<br />
e A2(k+1−s) B2u(s)ds. (4)<br />
By substituting x(k +d) from Eq. (3) into Eq. (4), the discrete time mapping of the switched system from the beginning to<br />
the end of the period is derived as<br />
x(k +1) = e A2(1−d)<br />
k+d<br />
A1d A2(1−d)<br />
e x(k)+e<br />
Therefore, in discrete time the system is written in the form<br />
where F is the transition matrix of the periodic system<br />
k<br />
e A1(k+d−s) B1u(s)ds+<br />
x(k +1) = Fx(k)+G{u(t)}<br />
F = e A2(1−d) e A1d<br />
k+1<br />
k+d<br />
e A2(k+1−s) B2u(s)ds.<br />
and G{u(t)} is to be understood as a linear operator onu(t).<br />
The stability of the switched system is guaranteed if the eigenvalues of the transition matrix lie inside the unit disk on the<br />
complex plane (stability of discrete time systems). Check the stability of the complete system for all values of d in the<br />
following cases (The exponential matrix in MATLAB is calculated using the command expm):<br />
1.<br />
2.<br />
A1 =<br />
A1 =<br />
Exercise 3 Stability and Internal Stability<br />
<br />
−1 −1 2 1<br />
,A2 =<br />
1 −1 −8 −3<br />
<br />
−1 −1<br />
,A2 =<br />
1 −1<br />
<br />
−2 −1<br />
8 −3<br />
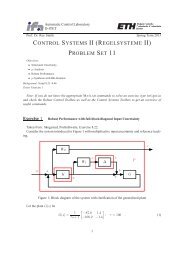
Consider the SISO system given in Fig. 1. Examine the system’s internal stability and compare with the stability of the<br />
transfer function from r toy for the following cases, τ1,τ2,τ3 > 0:<br />
1.<br />
2.<br />
3.<br />
p(s) =<br />
1 τ1s+1<br />
, c(s) =<br />
τ1s+1 τ2s+1<br />
p(s) = τ1s+1 τ2s−1<br />
, c(s) =<br />
τ2s−1 (τ1s+1)(τ3s+1)<br />
p(s) = τ1s−1 τ2s+1<br />
, c(s) =<br />
τ2s+1 (τ1s−1)(τ3s+1)<br />
2 of 3
−<br />
c(s)<br />
du<br />
p(s)<br />
Figure 1: Block diagram for the discussion of Internal Stability<br />
Exercise 4 Controllability and Observability<br />
The linearized equations of motion for a satellite are<br />
where<br />
and<br />
˙x(t) = Ax(t)+Bu(t)<br />
y(t) = Cx(t)<br />
⎡<br />
0<br />
⎢<br />
A = ⎢3ω<br />
⎣<br />
1 0 0<br />
2<br />
0<br />
0<br />
0<br />
⎤ ⎡ ⎤<br />
0 0<br />
0 2ω⎥<br />
⎢<br />
⎥<br />
0 1 ⎦ , B = ⎢1<br />
0 ⎥<br />
⎣0<br />
0⎦<br />
, C =<br />
0 −2ω 0 0 0 1<br />
u =<br />
u1<br />
u2<br />
<br />
, y =<br />
dy<br />
<br />
1 0 0 0<br />
0 0 1 0<br />
The inputs u1 and u2 are the radial and tangential thrusts, the state variables x1 and x3 are the radial and angular deviations<br />
from the reference (circular) orbit and the outputs y1 and y2 are the radial and angular measurements, respectively.<br />
Forω = 1, show that<br />
1. The system is controllable using both control inputs.<br />
2. The system is controllable using only a single input. Which one is it?<br />
3. The system is observable using both measurements.<br />
4. That the system is observable using only one measurement. Which one is it?<br />
3 of 3<br />
y1<br />
y2<br />
<br />
.<br />
y







![Convex Optimization: [0.5ex] from Real-Time ... - ETH Zürich](https://img.yumpu.com/18678007/1/190x143/convex-optimization-05ex-from-real-time-eth-zurich.jpg?quality=85)