

WAVES AND VIBRATIONS IN INHOMOGENEOUS STRUCTURES ...
WAVES AND VIBRATIONS IN INHOMOGENEOUS STRUCTURES ...
WAVES AND VIBRATIONS IN INHOMOGENEOUS STRUCTURES ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
V ¼ 0:3 at a given time instant for two values of E0. Spurious highfrequency<br />
oscillations in the velocities are noted which add substantially<br />
to the computed energies and these grow stronger with<br />
increasing stiffness contrast E0. The oscillations are a result of the<br />
fact that the simple time integration scheme is incapable of treating<br />
finite time-discontinuous materials properties properly.<br />
The oscillations not only lead to inaccurate predictions of the<br />
energy change, but more importantly, to instabilities in the optimization<br />
algorithm. Thus, the problem should be resolved. A natural<br />
way is to use a more advanced time integration scheme. Specialized<br />
schemes have been developed for temporal laminates in<br />
[36] and for structures with moving material interfaces in [35],<br />
but these cannot be directly applied in this case since the appearance<br />
of the structure is not known a priori. Alternatively, the use of<br />
a space–time finite element scheme could probably overcome this<br />
problem. Another, simpler, way to reduce the presence of spurious<br />
oscillations, while still preserving the overall behavior, is to add<br />
stiffness dependent damping that dissipates mainly the high-frequency<br />
oscillations<br />
C ¼ b<br />
x2 eK; ð9Þ<br />
0<br />
in which b is a damping coefficient, x0 is the center-frequency of<br />
the wave and e K is a constant stiffness matrix corresponding to<br />
the normalized background material. The scaling of the damping<br />
coefficient with x 2<br />
0 gives b the unit ðkg mÞ 1 .<br />
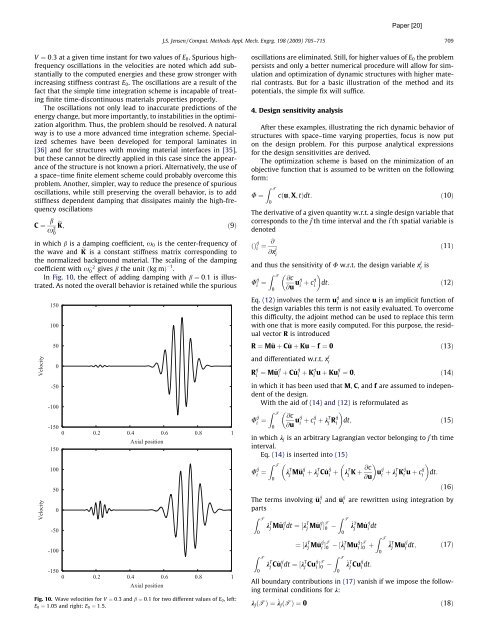
In Fig. 10, the effect of adding damping with b ¼ 0:1 is illustrated.<br />
As noted the overall behavior is retained while the spurious<br />
Velocity<br />
Velocity<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
0 0.2 0.4 0.6 0.8 1<br />
Axial position<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
0 0.2 0.4 0.6 0.8 1<br />
Axial position<br />
Fig. 10. Wave velocities for V ¼ 0:3 and b ¼ 0:1 for two different values of E0, left:<br />
E0 ¼ 1:05 and right: E0 ¼ 1:5.<br />
J.S. Jensen / Comput. Methods Appl. Mech. Engrg. 198 (2009) 705–715 709<br />
oscillations are eliminated. Still, for higher values of E0 the problem<br />
persists and only a better numerical procedure will allow for simulation<br />
and optimization of dynamic structures with higher material<br />
contrasts. But for a basic illustration of the method and its<br />
potentials, the simple fix will suffice.<br />
4. Design sensitivity analysis<br />
After these examples, illustrating the rich dynamic behavior of<br />
structures with space–time varying properties, focus is now put<br />
on the design problem. For this purpose analytical expressions<br />
for the design sensitivities are derived.<br />
The optimization scheme is based on the minimization of an<br />
objective function that is assumed to be written on the following<br />
form:<br />
U ¼<br />
Z T<br />
0<br />
cðu; X; tÞdt: ð10Þ<br />
The derivative of a given quantity w.r.t. a single design variable that<br />
corresponds to the j 0 th time interval and the i 0 th spatial variable is<br />
denoted<br />
ðÞ 0j<br />
i<br />
¼ @<br />
@x j<br />
i<br />
and thus the sensitivity of U w.r.t. the design variable x j<br />
i is<br />
U 0j<br />
i ¼<br />
Z T<br />
0<br />
@c<br />
@u u0j<br />
i<br />
þ c0j<br />
i<br />
ð11Þ<br />
dt: ð12Þ<br />
Eq. (12) involves the term u 0j<br />
i and since u is an implicit function of<br />
the design variables this term is not easily evaluated. To overcome<br />
this difficulty, the adjoint method can be used to replace this term<br />
with one that is more easily computed. For this purpose, the residual<br />
vector R is introduced<br />
R ¼ M€u þ C _u þ Ku f ¼ 0 ð13Þ<br />
and differentiated w.r.t. x j<br />
i<br />
R 0j 0j<br />
i ¼ M€u<br />
i þ C _u 0j<br />
i<br />
þ K0j<br />
i u þ Ku0j<br />
i ¼ 0; ð14Þ<br />
in which it has been used that M, C, and f are assumed to independent<br />
of the design.<br />
With the aid of (14) and (12) is reformulated as<br />
U 0j<br />
i ¼<br />
Z T<br />
0<br />
@c<br />
@u u0j<br />
i<br />
þ c0j<br />
i þ kT<br />
j R0j<br />
i<br />
dt; ð15Þ<br />
in which kj is an arbitrary Lagrangian vector belonging to j 0 th time<br />
interval.<br />
U 0j<br />
i ¼<br />
Eq. (14) is inserted into (15)<br />
Z T<br />
0<br />
k T<br />
j<br />
0j<br />
M€u i þ kT<br />
j C _u 0j<br />
i<br />
@c<br />
þ kT<br />
j K þ<br />
@u u0j<br />
i<br />
þ kT<br />
j K0j<br />
i<br />
u þ c0j<br />
i dt:<br />
ð16Þ<br />
The terms involving €u 0j<br />
i and _u 0j<br />
i are rewritten using integration by<br />
parts<br />
Z T<br />
0<br />
k T<br />
j<br />
Z T<br />
k<br />
0<br />
T<br />
j C _u 0j<br />
i<br />
0j<br />
M€u i dt ¼½kT j M _u 0j<br />
i ŠT<br />
0<br />
dt ¼½kT<br />
¼½k T<br />
j M _u 0j<br />
i ŠT<br />
0<br />
j Cu0j<br />
i ŠT<br />
0<br />
Z T<br />
0<br />
_k T<br />
j M _u 0j<br />
i dt<br />
½ _ k T<br />
j Mu0j<br />
i ŠT<br />
0 þ<br />
Z T<br />
0<br />
_k T<br />
j Cu0j<br />
i dt:<br />
Z T<br />
0<br />
€k T<br />
j Mu0j<br />
i dt;<br />
ð17Þ<br />
All boundary contributions in (17) vanish if we impose the following<br />
terminal conditions for k:<br />
kjðTÞ ¼ _ kjðTÞ ¼0 ð18Þ














