

Antti Lehtinen Doppler Positioning with GPS - Matematiikan laitos
Antti Lehtinen Doppler Positioning with GPS - Matematiikan laitos
Antti Lehtinen Doppler Positioning with GPS - Matematiikan laitos

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Dic<br />
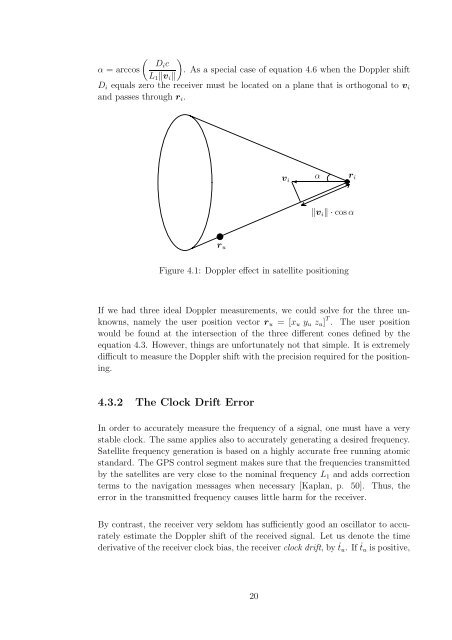
α = arccos . As a special case of equation 4.6 when the <strong>Doppler</strong> shift<br />
L1vi<br />
Di equals zero the receiver must be located on a plane that is orthogonal to vi<br />
and passes through ri.<br />
ru<br />
vi ✛<br />
α<br />
ri<br />
vi·cos α<br />
Figure 4.1: <strong>Doppler</strong> effect in satellite positioning<br />
If we had three ideal <strong>Doppler</strong> measurements, we could solve for the three unknowns,<br />
namely the user position vector ru =[xu yu zu] T . The user position<br />
would be found at the intersection of the three different cones defined by the<br />
equation 4.3. However, things are unfortunately not that simple. It is extremely<br />
difficult to measure the <strong>Doppler</strong> shift <strong>with</strong> the precision required for the positioning.<br />
4.3.2 The Clock Drift Error<br />
In order to accurately measure the frequency of a signal, one must have a very<br />
stable clock. The same applies also to accurately generating a desired frequency.<br />
Satellite frequency generation is based on a highly accurate free running atomic<br />
standard. The <strong>GPS</strong> control segment makes sure that the frequencies transmitted<br />
by the satellites are very close to the nominal frequency L1 and adds correction<br />
terms to the navigation messages when necessary [Kaplan, p. 50]. Thus, the<br />
error in the transmitted frequency causes little harm for the receiver.<br />
By contrast, the receiver very seldom has sufficiently good an oscillator to accurately<br />
estimate the <strong>Doppler</strong> shift of the received signal. Let us denote the time<br />
derivative of the receiver clock bias, the receiver clock drift, by˙tu. If˙tu is positive,<br />
20













