Linear Control Design – Final Exam
Linear Control Design – Final Exam
Linear Control Design – Final Exam

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Linear</strong> <strong>Control</strong> <strong>Design</strong> <strong>–</strong> <strong>Final</strong> <strong>Exam</strong><br />
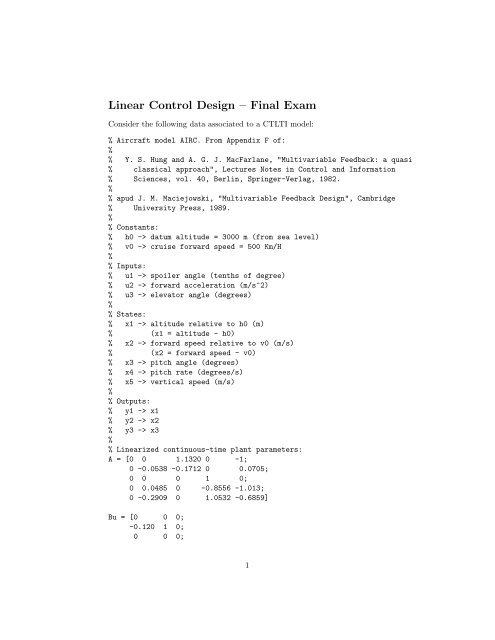
Consider the following data associated to a CTLTI model:<br />
% Aircraft model AIRC. From Appendix F of:<br />
%<br />
% Y. S. Hung and A. G. J. MacFarlane, "Multivariable Feedback: a quasi<br />
% classical approach", Lectures Notes in <strong>Control</strong> and Information<br />
% Sciences, vol. 40, Berlin, Springer-Verlag, 1982.<br />
%<br />
% apud J. M. Maciejowski, "Multivariable Feedback <strong>Design</strong>", Cambridge<br />
% University Press, 1989.<br />
%<br />
% Constants:<br />
% h0 -> datum altitude = 3000 m (from sea level)<br />
% v0 -> cruise forward speed = 500 Km/H<br />
%<br />
% Inputs:<br />
% u1 -> spoiler angle (tenths of degree)<br />
% u2 -> forward acceleration (m/s^2)<br />
% u3 -> elevator angle (degrees)<br />
%<br />
% States:<br />
% x1 -> altitude relative to h0 (m)<br />
% (x1 = altitude - h0)<br />
% x2 -> forward speed relative to v0 (m/s)<br />
% (x2 = forward speed - v0)<br />
% x3 -> pitch angle (degrees)<br />
% x4 -> pitch rate (degrees/s)<br />
% x5 -> vertical speed (m/s)<br />
%<br />
% Outputs:<br />
% y1 -> x1<br />
% y2 -> x2<br />
% y3 -> x3<br />
%<br />
% <strong>Linear</strong>ized continuous-time plant parameters:<br />
A = [0 0 1.1320 0 -1;<br />
0 -0.0538 -0.1712 0 0.0705;<br />
0 0 0 1 0;<br />
0 0.0485 0 -0.8556 -1.013;<br />
0 -0.2909 0 1.0532 -0.6859]<br />
Bu = [0 0 0;<br />
-0.120 1 0;<br />
0 0 0;<br />
1
4.4190 0 -1.665;<br />
1.5750 0 -0.0732]<br />
Cy = [eye(3) zeros(3,2)]<br />
1. Study the controllability properties of the inputs (is the plant controllable<br />
from individual inputs?) Study the observability properties of the outputs<br />
(is the plant observable from individual outputs?)<br />
2. State the following problem as an H2 norm minimization problem: using<br />
only the spoiler angle (u1) as a control input, design a controller that<br />
minimizes the sum of the variance of the pitch angle (y3) and the variance<br />
of the control input (u1) when the aircraft is subject to zero mean unity<br />
variance white-noise perturbations on the altitude, forward and vertical<br />
speeds (x1, x2, x5).<br />
3. State an appropriate SDP (LMI set and linear objective) that can be used<br />
to solve the above problem. Solve the problem by computing a solution<br />
to this SDP.<br />
4. Solve the same problem using a Riccati equation (matlab function lqr).<br />
Are you having trouble with this? Can you explain why? Did you have<br />
this problem with the SDP solution? If not, how can you tell something is<br />
“wrong” by looking at the matrices that came as a solution to the SDP?<br />
5. The design specifications for this aircraft are:<br />
Desired Pitch Angle Variance (x3) 1<br />
Desired Altitude Variance (x1) 0.25<br />
Can you attain that performance with the above design? If not, why?<br />
6. Consider now that you can also use the elevator angle (u3) as a control<br />
input. In order to prevent saturation of the actuators, the variance of the<br />
control inputs should be limited to the following values:<br />
Maximum Spoiler Angle Variance (u1) 100<br />
Maximum Elevator Angle Variance (u3) 100<br />
State a multi-objective H2 norm minimization control design problem that<br />
can be used to check the existence of a controller satisfying simultaneously<br />
all performance and control requirements. State this problem as an SDP.<br />
For the given values, does such a controller exist? In the affirmative<br />
case design a controller that satisfies the requirements and minimizes the<br />
elevator angle (u3) variance.<br />
7. You would make the life of the person who designs the wiring of this<br />
aircraft easier if the spoiler angle control input (u1) feedback only the<br />
2
pitch angle (x3) and the pitch rate (x4), and the elevator angle input (u3)<br />
feedback only the altitude (x1), the forward speed (x2) and the vertical<br />
speed (x5). How can you modify the SDP obtained in the previous item<br />
to account for this particular control structure? Can you design such a<br />
structured controller satisfying all performance and control specifications?<br />
If not, relax, and relax the performance requirements a little bit so as to<br />
obtain a feasible controller. <strong>Design</strong> a controller that satisfies the relaxed<br />
requirements and minimizes the elevator angle (u3) variance. Compute<br />
the actual performance of this controller. Does the actual performance<br />
satisfies the requirements?<br />
8. Are you happy with the above designs? (Justify with plots, simulations,<br />
numbers, or whatever you think necessary.)<br />
9. Are you happy with this course? Do you have any comments or suggestions?<br />
Do not expect that the answer given to this question be able to<br />
change your score. Not even positively :).<br />
10. (*) If you some extra time, try the design of item 6) with a full order dynamic<br />
output feedback controller. Assume you are measuring the altitude<br />
(y1) the forward speed (y2) and the pitch angle (y2).<br />
Some other details:<br />
• This exams and all homeworks are due on March 21 (Wednesday), at<br />
noon. No delays, please.<br />
• This exam will be assigned a grade in the range 0−10. If you do questions<br />
1) to 8) 100% correctly you have a 10. Item 10) grants you 3 extra points.<br />
That is, your exam will be assigned a grade in the range 0 − 13, with the<br />
final grade “saturating” at 10.<br />
• Your final grade will be a mix of the results of the final and the homeworks.<br />
• If you think you can do it by Friday, leave it on my mailbox. If you come to<br />
my office on Monday I can hand it back to you with a “preliminary grade”.<br />
This way, you’ll have a change to correct your mistakes till Wednesday.<br />
The final grade will be computed on the Wednesday version.<br />
3