

3+1 formalism and bases of numerical relativity - LUTh ...
3+1 formalism and bases of numerical relativity - LUTh ...
3+1 formalism and bases of numerical relativity - LUTh ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.2 Coordinates adapted to the foliation 55<br />
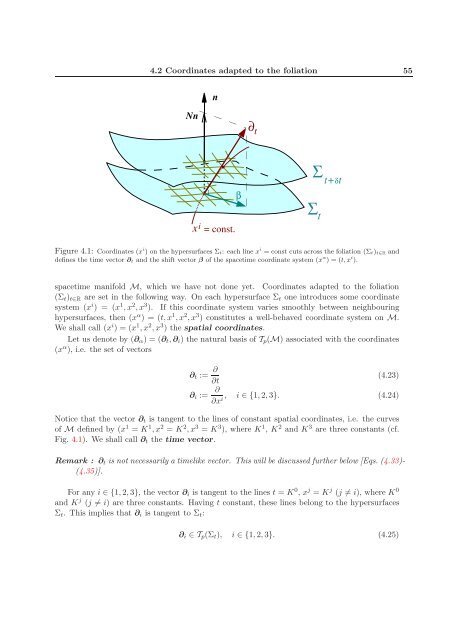
Figure 4.1: Coordinates (x i ) on the hypersurfaces Σt: each line x i = const cuts across the foliation (Σt)t∈R <strong>and</strong><br />
defines the time vector ∂t <strong>and</strong> the shift vector β <strong>of</strong> the spacetime coordinate system (x α ) = (t, x i ).<br />
spacetime manifold M, which we have not done yet. Coordinates adapted to the foliation<br />
(Σt)t∈R are set in the following way. On each hypersurface Σt one introduces some coordinate<br />
system (x i ) = (x 1 ,x 2 ,x 3 ). If this coordinate system varies smoothly between neighbouring<br />
hypersurfaces, then (x α ) = (t,x 1 ,x 2 ,x 3 ) constitutes a well-behaved coordinate system on M.<br />
We shall call (x i ) = (x 1 ,x 2 ,x 3 ) the spatial coordinates.<br />
Let us denote by (∂α) = (∂t,∂i) the natural basis <strong>of</strong> Tp(M) associated with the coordinates<br />
(x α ), i.e. the set <strong>of</strong> vectors<br />
∂t := ∂<br />
∂t<br />
(4.23)<br />
∂i := ∂<br />
∂xi, i ∈ {1,2,3}. (4.24)<br />
Notice that the vector ∂t is tangent to the lines <strong>of</strong> constant spatial coordinates, i.e. the curves<br />
<strong>of</strong> M defined by (x 1 = K 1 ,x 2 = K 2 ,x 3 = K 3 ), where K 1 , K 2 <strong>and</strong> K 3 are three constants (cf.<br />
Fig. 4.1). We shall call ∂t the time vector.<br />
Remark : ∂t is not necessarily a timelike vector. This will be discussed further below [Eqs. (4.33)-<br />
(4.35)].<br />
For any i ∈ {1,2,3}, the vector ∂i is tangent to the lines t = K 0 , x j = K j (j = i), where K 0<br />
<strong>and</strong> K j (j = i) are three constants. Having t constant, these lines belong to the hypersurfaces<br />
Σt. This implies that ∂i is tangent to Σt:<br />
∂i ∈ Tp(Σt), i ∈ {1,2,3}. (4.25)













