System Optimization of Motor Resolver including Drive Circuitry and ...
System Optimization of Motor Resolver including Drive Circuitry and ...
System Optimization of Motor Resolver including Drive Circuitry and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
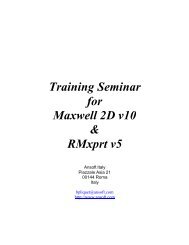
Future Work: 2. Replace the classical RDC with Type II Position<br />
Tracking mode<br />
E1<br />
E2<br />
Us1<br />
Uc1<br />
ICA:<br />
E4<br />
TRANS1<br />
TRC VM1.V >= 0<br />
STATE2<br />
SET: Vin_ref:=-1<br />
FML_INIT1<br />
Vin_ref:=0<br />
Vo_square:=0<br />
TRANS7<br />
N0004<br />
N0022<br />
N0012<br />
Signal Generator N0053<br />
N0045<br />
N0051<br />
Phase Shift<br />
+<br />
Magnitude Match<br />
R10<br />
V VM2<br />
C1<br />
+<br />
+<br />
+<br />
OPV52<br />
OPV53<br />
-<br />
R9<br />
OPV51<br />
-<br />
R4<br />
-<br />
R7<br />
R3<br />
STATE1<br />
SET: Vin_ref:=1<br />
TRANS2<br />
TRC VM1.V < 0<br />
Position<br />
EQU<br />
R5<br />
Pulse_pos:=abs(Vin_ref+Vo_square)/2<br />
Position_out:=0<br />
Position_out_temp:=0<br />
TRC (GZ1.VAL > 0) AND (Pulse_pos =0)<br />
STATE8<br />
SET: t2:=t<br />
SET: t3:=t2-t1<br />
STATE7<br />
SET: t1:=t<br />
TRANS8<br />
SET: Position_out :=10000*t3*180<br />
Classical RDC (<strong>Resolver</strong>-to-Digital Convertor)<br />
R6<br />
WAIT<br />
ICA:<br />
TRANS3<br />
TRC VM4.V >= 0<br />
STATE4<br />
SET: Vo_square:=-1<br />
FML_INIT2<br />
t1:=0<br />
t2:=0<br />
TRC (GZ1.VAL < 1) AND (Pulse_pos = 1)<br />
+<br />
VM3 V<br />
R8<br />
Delay<br />
GZ1<br />
STATE3<br />
+<br />
V VM4<br />
SET: Vo_square:=1<br />
TRANS4<br />
TRC VM4.V < 0<br />
TRC Position_out>Position_out_final<br />
ICA:<br />
Position_out_final:=0<br />
NEW_MAX<br />
STATE5<br />
TRANS5<br />
SET: Position_out_final:=Position_out<br />
True<br />
R1<br />
R2<br />
Theta<br />
E0<br />
E0<br />
Offset<br />
Offset<br />
1.80<br />
1.00<br />
0<br />
-1.00<br />
-1.80<br />
3.30<br />
0<br />
N0023<br />
N0086<br />
Cable_Excitation<br />
N0053<br />
2DGraphSel1<br />
9.00m 9.50m 10.00m<br />
2DGraphSel3<br />
theta<br />
N0087<br />
E2.V [V]<br />
VM3.V [V] 91.77<br />
Vsinomegatsintheta<br />
VM1.V [V]<br />
sinomegat<br />
-2.00<br />
-3.35<br />
V<br />
9.00m 9.50m 10.00m<br />
<strong>of</strong>fset<br />
2DGraphSel3<br />
Vsinomegatcostheta<br />
50.00<br />
3.50<br />
2.00<br />
VM1.V resolver [V]<br />
VM4.V [V]<br />
0<br />
N0086<br />
Cable_Out_Cos<br />
N0023<br />
N0087<br />
N0053<br />
N0086<br />
N0023<br />
Cable_Out_Sin<br />
N0087<br />
N0053<br />
-2.00<br />
-3.50<br />
9.00m 9.50m 10.00m<br />
910.00m<br />
500.00m<br />
0<br />
2DGraphSel3<br />
-500.00m<br />
-920.00m<br />
0 5.00m 10.00m<br />
R1.V [V]<br />
R2.V [V]<br />
+<br />
V VM1<br />
910.00m<br />
500.00m<br />
-500.00m<br />
-920.00m<br />
Scope 1<br />
0 5.00m 10.00m<br />
source11<br />
source12<br />
out11<br />
out12<br />
out21<br />
out22<br />
2DGraphSel3<br />
sin<br />
<strong>Resolver</strong>_FEA_Link<br />
S_ROTB1...<br />
Position_o..<br />
0<br />
0 5.00m resolver _RD_IC 8.59m<br />
2.00u<br />
+<br />
V VM5<br />
+<br />
V VM6<br />
0<br />
2DGraphSel3<br />
2DGraphSel1<br />
2.00u<br />
9.00m<br />
SIMPARAM1<br />
9.50m 10.00m<br />
R1.V [V]<br />
VM5.V [V]<br />
SIMP...<br />
cos<br />
910.00m<br />
500.00m<br />
-500.00m<br />
-910.00m<br />
0 5.00m 10.00m<br />
1.10<br />
1.00<br />
0<br />
2DGraphSel3<br />
2DGraphSel1<br />
899.00m<br />
9.00m 9.50m 10.00m<br />
Scope<br />
Rotor_21 +<br />
Rotor_22<br />
R2.V [V]<br />
VM6.V [V]<br />
SIMP...<br />
FEA<br />
Subtract 1<br />
S_ROTB1<br />
Φ<br />
phi<br />
180 /pi<br />
1/E1<br />
PHI<br />
Excitation<br />
Scope 4