System Optimization of Motor Resolver including Drive Circuitry and ...
System Optimization of Motor Resolver including Drive Circuitry and ...
System Optimization of Motor Resolver including Drive Circuitry and ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
E1<br />
E2<br />
Us1<br />
Uc1<br />
E4<br />
TRANS1<br />
TRC VM1.V >= 0<br />
ICA:<br />
STATE2<br />
SET: Vin_ref:=-1<br />
FML_INIT1<br />
Vin_ref:=0<br />
Vo_square:=0<br />
TRANS7<br />
N0004<br />
N0012<br />
N0045<br />
N0051<br />
Signal Generator<br />
N0022<br />
N0053<br />
Phase Shift<br />
+<br />
Magnitude Match<br />
R10<br />
V VM2<br />
C1<br />
+<br />
+<br />
+<br />
OPV52<br />
OPV53<br />
-<br />
R9<br />
OPV51<br />
-<br />
R4<br />
-<br />
R7<br />
R3<br />
STATE1<br />
SET: Vin_ref:=1<br />
TRANS2<br />
TRC VM1.V < 0<br />
Position<br />
EQU<br />
Position_out:=0<br />
Position_out_temp:=0<br />
TRC (GZ1.VAL > 0) AND (Pulse_pos =0)<br />
STATE8<br />
SET: t2:=t<br />
SET: t3:=t2-t1<br />
R5<br />
Pulse_pos:=abs(Vin_ref+Vo_square)/2<br />
STATE7<br />
SET: t1:=t<br />
TRANS8<br />
SET: Position_out :=10000*t3*180<br />
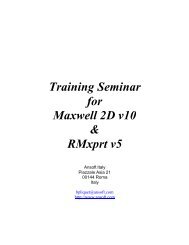
Classical RDC (<strong>Resolver</strong>-to-Digital Convertor)<br />
R6<br />
WAIT<br />
<strong>Resolver</strong> <strong>System</strong> Integration<br />
ICA:<br />
TRANS3<br />
TRC VM4.V >= 0<br />
STATE4<br />
SET: Vo_square:=-1<br />
FML_INIT2<br />
t1:=0<br />
t2:=0<br />
TRC (GZ1.VAL < 1) AND (Pulse_pos = 1)<br />
+<br />
VM3 V<br />
R8<br />
Delay<br />
GZ1<br />
STATE3<br />
+<br />
V VM4<br />
SET: Vo_square:=1<br />
TRANS4<br />
TRC VM4.V < 0<br />
TRC Position_out>Position_out_final<br />
ICA:<br />
Position_out_final:=0<br />
NEW_MAX<br />
STATE5<br />
TRANS5<br />
SET: Position_out_final:=Position_out<br />
True<br />
R1<br />
R2<br />
1.80<br />
1.00<br />
0<br />
-1.00<br />
-1.80<br />
3.30<br />
0<br />
-2.00<br />
-3.35<br />
3.50<br />
2.00<br />
0<br />
N0023<br />
N0086<br />
Cable_Excitation<br />
N0053<br />
N0086<br />
N0087<br />
Cable_Out_Cos<br />
2DGraphSel1<br />
9.00m 9.50m 10.00m<br />
2DGraphSel3<br />
N0087<br />
9.00m 9.50m 10.00m<br />
2DGraphSel3<br />
N0023<br />
N0053<br />
N0086<br />
N0023<br />
Cable_Out_Sin<br />
N0087<br />
N0053<br />
-2.00<br />
-3.50<br />
9.00m 9.50m 10.00m<br />
910.00m<br />
500.00m<br />
0<br />
2DGraphSel3<br />
-500.00m<br />
-920.00m<br />
0 5.00m 10.00m<br />
E2.V [V]<br />
VM3.V [V]<br />
VM1.V [V]<br />
VM1.V [V]<br />
VM4.V [V]<br />
R1.V [V]<br />
R2.V [V]<br />
91.77<br />
50.00<br />
+<br />
V VM1<br />
910.00m<br />
500.00m<br />
source11<br />
source12<br />
out11<br />
out12<br />
out21<br />
out22<br />
2DGraphSel3<br />
<strong>Resolver</strong>_FEA_Link<br />
S_ROTB1...<br />
Position_o..<br />
0<br />
0 5.00m<br />
8.59m<br />
2.00u<br />
+<br />
V VM5<br />
+<br />
V VM6<br />
0<br />
2DGraphSel3<br />
-500.00m<br />
-920.00m<br />
0 5.00m 10.00m<br />
2DGraphSel1<br />
2.00u<br />
9.00m<br />
SIMPARAM1<br />
9.50m 10.00m<br />
R1.V [V]<br />
VM5.V [V]<br />
SIMP...<br />
910.00m<br />
500.00m<br />
-500.00m<br />
-910.00m<br />
0 5.00m 10.00m<br />
1.10<br />
1.00<br />
0<br />
2DGraphSel3<br />
2DGraphSel1<br />
899.00m<br />
9.00m 9.50m 10.00m<br />
Rotor_21 +<br />
SIMP...<br />
Rotor_22<br />
R2.V [V]<br />
VM6.V [V]<br />
FEA<br />
S_ROTB1<br />
Φ