A multi-finger haptic interface for visually impaired people - Robot ...
A multi-finger haptic interface for visually impaired people - Robot ...
A multi-finger haptic interface for visually impaired people - Robot ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Proceedings of the 2003 IEEE lntematlonal Workshop on<br />
<strong>Robot</strong> and human lnteracliv~ Communcation<br />
Millbrae. Califomla. USA. Om 31 - hov 2.2003<br />
A Multi-Finger Haptic Interface <strong>for</strong> Visually Impaired People<br />
C.A. Avizzano, S. Marcheschi, M. Angerilli, M. Fontana, M. Bergamasco*<br />
T. Gutierrez**, M. Mannegeis***<br />
* PERCRO, Scuola Superiore S. Anna<br />
Piazza Martin d e b Liberta, 33. Pisa, Italy, mailto:carlo@sssup.it<br />
** Labein, Bilbao, Spain, *** National Council of Blind of Ireland<br />
Abstract<br />
The present paper deals with a novel type of dual point<br />
<strong>haptic</strong> system. The system exploits a novel kind of<br />
kinematics to achieve a high isotropy which improves the<br />
<strong>for</strong>ce rendering. Other features of the system are its high<br />
stiffness, high peak <strong>for</strong>ces together with a zero backlash<br />
cable based transmission. The device can be used by<br />
meam of a set of sizeable thimbles by any pairs of user’s<br />
<strong>finger</strong>tips. Such a device has been developed within the<br />
EU GRAB project, <strong>for</strong> testing a navel sei of application<br />
with blind users. Such a project investigates to which<br />
extent a purely <strong>haptic</strong> environment can be employedfrom<br />
users wirh visual impainnenrs in ierms OJ? the effective<br />
capabilities of the device to exchange high level<br />
in<strong>for</strong>mation with the users: the real degree of inieractioii<br />
which can be achieved in this ope of system; the effective<br />
opponuniry <strong>for</strong> the user to profit from the system using<br />
just this type of interncrion.The basic system concepts, the<br />
applicntion environmenr and the system perfonwnces are<br />
given in the following.<br />
1.Introduction<br />
Haptic <strong>interface</strong>s have proven to be extremely useful<br />
during the interaction of users within Virtual Environment<br />
(VE). Witbin these environment the use of the <strong>haptic</strong> sense<br />
is employed <strong>for</strong> enhancing the sense of presence by<br />
reproducing the contact <strong>for</strong>ces and other specific <strong>for</strong>ces on<br />
the user band (Emery 161). The use of such systems<br />
improves the interaction with the VE and increases the<br />
sense of presence and the dexterity of the users with the<br />
virtual objects.<br />
Within almost all the existing VE, the <strong>haptic</strong><br />
<strong>interface</strong>s work in cooperation with a visual feedback<br />
which integrates the contact in<strong>for</strong>mation with<br />
complementary visual in<strong>for</strong>mation. It is commonly<br />
accepted the position that the visual interaction is<br />
dominant in these types of interaction as well as it is<br />
known that <strong>haptic</strong> feedback can be used to improve the<br />
interaction of <strong>people</strong> with visual impairments. In (41<br />
OModhrain transcribed the visual in<strong>for</strong>mation of the<br />
screen and made it available to the <strong>haptic</strong> senses <strong>for</strong> blind<br />
person, by using a prototype two-axis HI, the Moose. In<br />
151 Melchiorri proposed a <strong>haptic</strong> tactile display to help<br />
<strong>people</strong> to navigated environments by means of an<br />
0-7803-81 36-W03/$17.00@2003 IEEE 165<br />
automated conversion of camera images to <strong>haptic</strong> “bas-<br />
relief”. In I71 Tzovaras experimented some of the effects<br />
of <strong>haptic</strong> <strong>interface</strong>d when Visual Impaired (VI) users<br />
interacts with them in VE.<br />
Figure 1. Typical system layout<br />
The <strong>for</strong>erunner research on use of <strong>haptic</strong> devices as<br />
<strong>for</strong>ce display tools when targeted to VI <strong>people</strong><br />
demonstrated that such a feedback can be conceived as<br />
being independent from visual cues. While in the case of<br />
sighted <strong>people</strong> such an approach is not very useful, it is<br />
specifically true <strong>for</strong> the case of VI <strong>people</strong>. In the specific<br />
case of VI, it can be conceived to associate audio feedback<br />
to <strong>haptic</strong> one in order to have a more immersive<br />
interaction. Such an idea is not completely new, In 191<br />
Ramstein presents a system in witch <strong>for</strong>ce feedback is<br />
introduced by enhancing the mouse through the addition<br />
of a Pantograph HI and “earcons”, along with voice<br />
synthesis, are used to identify objects and events. In 1101<br />
Pai experimented an <strong>interface</strong> having audio <strong>haptic</strong><br />
capabilities during the contact interaction. The integration<br />
of <strong>haptic</strong> feedback together with the audio feedback can<br />
provide an environment powerful enough to allow a<br />
com<strong>for</strong>table interaction to the computer <strong>interface</strong>s <strong>for</strong><br />
blind <strong>people</strong>.<br />
Since last five year, a lot of research activities have<br />
been carried out <strong>for</strong> building applications and systems well
'.<br />
:<br />
suited <strong>for</strong> being used from VI <strong>people</strong>. For example in [SI<br />
Kopacek set up a system <strong>for</strong> teaching to blind users.<br />
Notwithstanding the research ef<strong>for</strong>ts in this field and<br />
the encouraging results provided, it was commonly<br />
acknowledged by the authors' that the present <strong>haptic</strong><br />
systems were not sophisticated enough to allow blind<br />
<strong>people</strong> to effectively enabling VI <strong>people</strong> to interact with<br />
computer application. On the basis of these considerations,<br />
the GRAB consortium has been motivated to create a new<br />
type of system which is purposely developed <strong>for</strong> ihese<br />
users and that tries to overcome the technological limits in<br />
its most significant aspects.<br />
The main aim of GRAB is to allow blind <strong>people</strong> to<br />
access to the 3D graphic computer world through the sense<br />
of touch and with audio help. by means of a Haptic and<br />
Audio Virtual Environment (HAVE). The proposed<br />
HAVE would allow the user to move his <strong>finger</strong>s over the<br />
virtual objects, to interact with them, to recognize specific<br />
.features (comers, edges,..), as if he was manipulating a<br />
real mock-up of the object. Further features specifically<br />
thought <strong>for</strong> VI <strong>people</strong> enhance the level of interaction by<br />
means of a smart fusion of the audio-<strong>haptic</strong> feedback with<br />
the speech recognition capabilities included in the system.<br />
The GRAB system has been produced in a limited<br />
number of copies and it is currently subject to several<br />
validation tests in four users group laboratories all over<br />
Europe. The research discussed in this paper has been<br />
supported within the framework of the GRAB project The<br />
GRAB research has been canied on with the economic<br />
support of the European Union. In the present paper the<br />
basic structure of the GRAB system will be described, the<br />
design of the new <strong>haptic</strong> device discussed and the overall<br />
per<strong>for</strong>mances of the system reported. The functional test<br />
and the user validation of the device together with its<br />
application have been theme of another international paper<br />
r1.1.<br />
. .<br />
. . 2.Motivation<br />
Be<strong>for</strong>e starting the research activities, previous<br />
consortium experiments 121 had shown the difficulties in<br />
operating practical application with almost all<br />
commercially available HI?. The need <strong>for</strong> a large<br />
workspace, high manipulating <strong>for</strong>ces, high isotropy, access<br />
to <strong>multi</strong>ple <strong>finger</strong>s and a good <strong>for</strong>ce resolution were not<br />
addressed by any of the existing commercial devices on<br />
the market (PHANTOM, CyberGrasp, PCS Haptic Master,<br />
Delta, Virtuose [IZ]). A deep analysis of the features of<br />
these devices when applied to a VI population has been<br />
conducted in [3]. In particular, this preliminary user<br />
analysis, based on the mock-up evaluation and on the user<br />
survey, indicates that the possibility of separating the<br />
<strong>haptic</strong> in<strong>for</strong>mation among hands would allow the user to<br />
make a separate use <strong>for</strong> <strong>finger</strong>s. For example, one <strong>finger</strong><br />
can be dedicated to pan the environment while the other<br />
166<br />
can be used, <strong>for</strong> exploring the objects. On the basis of these<br />
considerations the Consortium decided to proceed in the<br />
development of a novel <strong>haptic</strong> system which is based on a<br />
new concept <strong>haptic</strong> device and a novel interacting<br />
environment. The figure 1 represents the components of<br />
the system assembled in a typical system layout.<br />
. .<br />
1 HAPTIC- AUDIO VIRTUAL ENVIRONMENT 1<br />
Figure 2iBasic Operation of the HAVE.<br />
The;+VE is based on the integration of:<br />
a new <strong>for</strong>ce feedback <strong>haptic</strong> <strong>interface</strong> capable of<br />
replicating independent <strong>for</strong>ce vectors on two <strong>finger</strong>tips,<br />
wi,th 'a workspace covering a large part of the user<br />
desktop and with a high <strong>for</strong>ce feedback fidelity to<br />
perceive tiny geometrical details of the objects:<br />
a <strong>haptic</strong> geomevic modeller (HGM) to provide <strong>haptic</strong><br />
stimuli to be rendered by the HI and sound aids to<br />
improve the interaction among the user, the new HI<br />
d d any 3D virtual object.<br />
The figure 2 shows the basic operation of the GRAB<br />
HAVE and the interaction between the user and the two<br />
main components of the system (<strong>haptic</strong> <strong>interface</strong> and<br />
<strong>haptic</strong> geometric modeller) during the interaction tasks.<br />
Using.the sensor readings of the <strong>haptic</strong> <strong>interface</strong>, the<br />
system can compute the spatial position of the user <strong>finger</strong>s<br />
and compare them with the description of a virtual space.<br />
3.Description of the system<br />
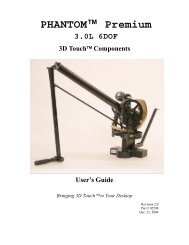
The main hardware components of the system consist<br />
in the following elements (Figure 3): a twc-<strong>finger</strong> <strong>haptic</strong><br />
<strong>interface</strong>, a driving unit and a control unit.<br />
The <strong>haptic</strong> <strong>interface</strong> is composed by two identical<br />
robotic arms. Each ann has 6 Degree of Freedoms<br />
(DOF's), of which 3 are required to track the position of<br />
the <strong>finger</strong>tip in 3D space and the remaining 3 are required<br />
to track its orientation. The arms will interact with the<br />
user's <strong>finger</strong>s by means of a couple of thimble the user can<br />
suit.
1 1<br />
Figure 3. Hardware component of the system<br />
Due to the large workspace requirements, a serial<br />
kinematics has been selected the first 3 DOF's are used to<br />
track the position while the last 3 DOF's to track the<br />
orientation. In this case, only the first 3 DOF's have to he<br />
actuated in order to exert <strong>for</strong>ces of arbitrary orientation at<br />
the <strong>finger</strong>tip, while the last DOF's can he passive because<br />
it is not required to exert moments. The following figure<br />
shows briefly the kinematic scheme adopted <strong>for</strong> the<br />
solution:<br />
Figure 4. Kinematics scheme of the MACRO<br />
This kinematic solution allows a very high degree of<br />
isotropy of each arm w.r.1. other kinematics solutions, like<br />
that used <strong>for</strong> the PHANTOM. A high degree of isotropy is<br />
important in order to achieve a uni<strong>for</strong>m use of the<br />
actuators in the workspace of the device and to have a<br />
uni<strong>for</strong>m reflected inertia.<br />
In order to improve the transparency of use of the<br />
device, the following design guidelines have been adopted,<br />
<strong>for</strong> the design of the anns:<br />
Remote localization of the motors<br />
Selection of motors with high torque to mass ratio and<br />
high torque to rotor inertia ratio<br />
Use of tendon transmissions<br />
Use of low reduction ratio geared reducer<br />
Use of light materials <strong>for</strong> the construction of the<br />
moving links<br />
Low or zero backlash implementation of the joints.<br />
167<br />
These guidelines have been implemented as follow:<br />
The first 2 actuators have been mounted integral with<br />
the fixed link (base), while the third actuator has been<br />
mounted integral with the second moving link (link2)<br />
having its center of gravity very close to the<br />
intersection of the yaw and pitch axes of the<br />
mechanism that is fxed w.r.t. the ground;<br />
As actuators, brushed DC setvomotors have been<br />
selected, with an iron-less construction of the rotor;<br />
Metallic in tension tendons routed on idle pulleys have<br />
been used as means of transmission of <strong>for</strong>ces <strong>for</strong>m the<br />
actuators to the joints;<br />
No geared reducer have been used<br />
All the structural parts have been realized in<br />
aluminum.<br />
In fig.5 an assonomeuic view of the final device is<br />
reported.<br />
Figure 5. Assonometric view of the <strong>haptic</strong> <strong>interface</strong>.<br />
The control unit provides the required real time<br />
support <strong>for</strong> running a Real time operating system. A<br />
850MHz PENTIUM m provides the required computing<br />
power <strong>for</strong> a 2.5Khz control frequency. The unit is capable<br />
of managing the following U 0 ECP Xbit parallel U 0 <strong>for</strong><br />
communicating to a remote PC, 24 bit digital IN digital<br />
OUT <strong>for</strong> device control, 6 Digital Analog Converters <strong>for</strong><br />
drivers and motor control, 6 24-bit encoder inputs <strong>for</strong><br />
encoders monitoring.<br />
The control system kernel will be based on Linux and<br />
a real-time micro-kernel which ensures high per<strong>for</strong>mances<br />
capabilities (up to 5 0 m z typical switching time with few<br />
microsecond latency [141). All the data VO will be<br />
provided with real-time device drivers.<br />
Connection with the HGM (Haptic Geometric<br />
Modeller) that runs on a remote PC computer is achieved<br />
by means of an ECP parallel port <strong>interface</strong> which allow<br />
high data throughput (>=500 Kbytekec), bi-directional<br />
communication, low CPU resource request (automatic<br />
FIFO and handshake) and no latencies. The ECP standard<br />
(defined by the IEEE 1284 specs) has been selected as the<br />
target communication hardware <strong>for</strong> GRAB due to its low<br />
costs and the availability to common personal computers.
Law-level control software has been implemented in<br />
order to provide system the following functionalities:<br />
manage the ECP communication<br />
verify, change and store the received value <strong>for</strong> system<br />
tunable parameters<br />
provide sound feedback<br />
generate the correct HI control motors signal <strong>for</strong><br />
moving two arms and <strong>for</strong> activating the <strong>for</strong>ce feedback<br />
functionality<br />
. Furthermore the control system identifies, describes<br />
and compensates a wide set of non linear features such as<br />
i the arm kinematics and dynamics, the unbalanced weight<br />
.. effects, the transmission model of the elastic cable, the<br />
distributed friction effects, the electrical features of the<br />
power supply, the errors due to swctural deflection under<br />
: load conditions.<br />
...<br />
All the features available have been embedded into<br />
the control system and masked with respect to the external<br />
usage so that they can be transparently used by a remote<br />
.'application (the HGM).<br />
Figure 6. Schematic of the control architecture.<br />
a.Control architecture<br />
For executing all tasks and procedures which involve<br />
HI actuation, that is to generate the correct HI motors<br />
control signals starting from the received HGM command,<br />
HI controller architecture is implemented on 3 different<br />
level.<br />
Four control modes have been implemented<br />
position control, used when is necessary to move HI<br />
along a predefined trajectory and/or with a predefined<br />
speed<br />
<strong>for</strong>ce control, used 'when the system should be<br />
actuated in order to apply the desired <strong>for</strong>ces on <strong>finger</strong><br />
compensation control, this allows to compensate<br />
different system non linearity<br />
calibration control, this features enhance the accuracy<br />
of the <strong>for</strong>ce feedback by improving the. spatial<br />
resolution of the devices and synchronizing the arm<br />
thimbles position measurements. In a visionless VE<br />
this instruments improves coherence of devices and the<br />
168<br />
quality of the interaction.' Being based on a novel<br />
synchronization method il' will be discussed in a<br />
<strong>for</strong>thcoming paper.<br />
'Ibe control software is arranged as a hybrid hard real-<br />
time hierarchically organized control. The highest-level<br />
control scheme is arranged io a few number of subsystems<br />
containing specific software which implements each of<br />
functionalities below.<br />
Figure I. HI Controller functionalities.<br />
As shown in figure 6, the heart of the GRAB control<br />
system model is represented by the Master Main<br />
Machine which provide to manage and coordinate whole<br />
system functionalities according to command and data<br />
received from HGM computer and to monitor the system<br />
status.<br />
HI controUer, is the main part of control software<br />
which provides to controls the HI in order to execute<br />
specific task established by Master State Machine; it<br />
includes positiod<strong>for</strong>ce control and compensation of HI,<br />
models of different system components, U 0 board drivers<br />
which <strong>interface</strong>s the control software with hardware<br />
signals (encoder and signals to motor power supply) ...<br />
Sound Driver, a set of simple midi songs are<br />
implemented in order to indicate the current status of<br />
control system (movement, ready, run ...).<br />
ECP communication, contains a fast real time driver<br />
and a local state machine which provides to manage and to<br />
monitor ECP data transmission: thus, it allows the Master<br />
State Machine to receivekend commandheply and data<br />
buffer f r d t o HGM computer according to a simple<br />
internal protocol; this module is most important during<br />
<strong>for</strong>ce feedback phase because it should provide to receive<br />
from the HGM the desired <strong>for</strong>ces <strong>for</strong> the arms and then to<br />
send to the HGM the position of each arm.<br />
Tunable Parameters, by predefined sets of<br />
command, HGM computer can changes the current values
<strong>for</strong> some control parameters, i.e. position and orientation<br />
of reference system respect to which are defined positions<br />
and <strong>for</strong>ces of thimbles.<br />
Main State Machine also provides to monitor the<br />
system status in order to stop and recover system in safe<br />
way if some malfunctions occur. In particular, the<br />
following error conditions are kept into consideration:<br />
moton are not correctly actuated or sensorized, (i.e.<br />
some cables are not connected): by sending a<br />
calibrated low torque on each motor and by reading the<br />
correspondent rotor position, it is possible to detect any<br />
error condition; this feature test is executed be<strong>for</strong>e<br />
activating any HI position or <strong>for</strong>ce control;<br />
. during all control phases in which two arms are moved<br />
along predefined path, collisions whit obstacle (i.e.<br />
user of some object placed on the desktop) can occur:<br />
low saturation levels are applied on motor currents in<br />
order to avoid any possible damages and the movement<br />
is stopped if the time required <strong>for</strong> reaching a single<br />
step along the path is greater than predefined one;<br />
when the <strong>for</strong>ce feedback is activated, <strong>for</strong>ce data<br />
transmission is constantly monitored in order to detect<br />
any data error and too long transmission timeout.<br />
4.System at work<br />
When integrated with the application software<br />
running on the remote computer the system can work at a<br />
control frequency up to 2KHz (currently IKHz) and<br />
according to the software a wide number of functionalities<br />
can be perceived. The running software is the HGM it is a<br />
VE editor which allow user to design and <strong>haptic</strong>ally test<br />
the workspaces. In order to be coherent with the user’s<br />
requirements and the <strong>interface</strong> features, the current version<br />
of the HGM supports <strong>multi</strong>ple contact points. As show in<br />
figure 8, the HGM aggregates these <strong>haptic</strong> features to a<br />
coordinate audio recognition and synthesis engine. The<br />
modeller is completely modular and supports a scalable<br />
number of objects and features. The modeller bas been<br />
developed so that a large number of task could per<strong>for</strong>med<br />
without requiring any extemal coding, among them:<br />
Find simple objects and identify the shape;<br />
Explore different features: weight, <strong>haptic</strong> textures and<br />
buttons, stiffness, stickiness (guided adherence to<br />
surfaces);<br />
Constraining movement to: follow trajectories, tie<br />
movement to the boundary of an object and explore<br />
surface’s attraction and repulsion <strong>for</strong>ces;<br />
Unexplored objects: audio and <strong>for</strong>ce feedback;<br />
Grasp and move objects detecting collisions;<br />
Zoom in and zoom out the environment and panning<br />
the virtual workspace.<br />
At present, on the top of the HGM software three<br />
different types of computer interaction may be run:<br />
169<br />
Exploration of chart data (with automatic import<br />
utilities from common data sources);<br />
City Map explorer, that enables user to <strong>haptic</strong>ally<br />
explore the city maps from a GIS representation;<br />
A simple adventure game, used <strong>for</strong> testing and<br />
assessing the to which extent VI <strong>people</strong> can <strong>haptic</strong>ally<br />
interact with computer application.<br />
Figure 8. HAVE dum@ 3 valid3iion test.<br />
5.Per<strong>for</strong>mances of the system<br />
Be<strong>for</strong>e testing the system with the HGM environment<br />
and with the users’ group, at the end of the assembling<br />
phase a wide set of test has been per<strong>for</strong>med. Here they are<br />
some of the achieved results:<br />
Workspace: the shared workspace of the ann twins is a<br />
box 400 mm depth, 400 mm high, 600 mm wide. Such<br />
a box is achieved when the arms are placed as shown<br />
in figure 1. By using the special calibration tool offered<br />
in the controller the arms can be placed everywhere on<br />
the users desktop with a resulting change in the shared<br />
workspace:<br />
Continuous <strong>for</strong>ce: the motorisation group make use of<br />
PM-DC motors that provide a maximum continuous<br />
torque that gives a <strong>for</strong>ce at the end-effector of 4 N in<br />
the worst condition (tyyical is 6-7 N);<br />
Peak <strong>for</strong>ces: <strong>for</strong> short time periods peak <strong>for</strong>ces as<br />
higher as 20 N (in the worst workspace .~ position) can<br />
&-exerted;<br />
Stiffness: as <strong>for</strong> the <strong>for</strong>ce, worst stiffness is 2 Nlmm,<br />
but typical ranges from 6-8 Nlmm;<br />
e Friction: the mechanical solutions adopted <strong>for</strong><br />
motorisation and transmission systems allow to obtain<br />
perceived friction less than 200 mN without<br />
compensation and less than 20 mN with compensation:<br />
Position resolution: worst condition offers a position<br />
resolution of 0.1 mm;<br />
Joint accuracy and coherence: once adequately<br />
calibrated, inter thimble position errors are below 0.5<br />
“/IO0 mm (less that 1 %);
Force resolution: dynamic compensation of<br />
gravitational effect, static and viscous friction and of<br />
the elastic transmission model allow to achieve<br />
residual error which are about 2-4 % of the exerted<br />
<strong>for</strong>ce;<br />
Mechanical Inertia at the <strong>finger</strong>tips: the inertial<br />
properties at the <strong>finger</strong>tips are highly improved with<br />
the isotropy of the mechanical design. Design values<br />
<strong>for</strong> this per<strong>for</strong>mance are less than 0.4 Kg along the<br />
directions orthogonal to the third DOF in the worst<br />
case (typical values are about 0.2 Kg), and less than<br />
0.5 Kg constant along the direction of the thud DOF.<br />
financial assistance of the EU which co-funded the project<br />
within the IST-2000-26151 GRAB (www.grab-eu.com),<br />
GRaphical Access <strong>for</strong> Blind <strong>people</strong>, project. The authors<br />
are gateful to the EU <strong>for</strong> the support given in carrying on<br />
these activities.<br />
References<br />
[ I ] Man&, M. el Al. CRAB - A new <strong>haptic</strong> and audio virrual<br />
6.Conclusion<br />
The evaluation of the first prototype of system<br />
undertaken by end users has shown preliminary<br />
in<strong>for</strong>mation on the <strong>interface</strong> and on the degree of<br />
interaction the user can have with such a system.<br />
The <strong>interface</strong> has some key features and<br />
functionalities appear being unique or superior w.r.t<br />
current commercial <strong>haptic</strong> systems. The main issues that<br />
users identified as being the most valuable are: the<br />
simultaneous use of two <strong>finger</strong>s in a common workspace,<br />
the larger shared workspace, the smoothly refined<br />
movement, the robustness of the device, the position<br />
accuracy, the high peak <strong>for</strong>ces, the fidelity in terms of<br />
judging sizes and comparative distances, audio input and<br />
output, interaction with a changing environment (buttons,<br />
moving objects, organising objects, detecting<br />
collisions...), the interaction and exploration of objects<br />
including features like: weight, stiffness, stickiness,<br />
curvatures, attraction <strong>for</strong>ces, following a trajectory,<br />
utilities to find, recognise and explore small objects.<br />
[Z]<br />
171<br />
enviromenr cmbling vision <strong>impaired</strong> <strong>people</strong> ro access rhe three<br />
dinknsionol compurer graphic world, WP) Advancement of<br />
Asistive Technology in Europe ( M A T E ) 2003, D u b h , lreland<br />
Gutiwrez T.. Carill0 A., Femandaz J.L. Munoz J.A., Compurer<br />
GraDhicr ADD/icafionr <strong>for</strong> rhe Blind Peode, . DO. .. 1-5, SenrAble<br />
c0rporation;im -<br />
GRAB Proctiml Fensibiliry Study. Rojm intemal repon. GRAB<br />
EU IST-ZwO-26tSI<br />
OModhraio M. S., Gillespie B.. n e Mwre: A Hopric User<br />
Interface <strong>for</strong> Blind Person$. CCRMA. Depmmmt of Music<br />
Sm<strong>for</strong>d Universily. Stan<strong>for</strong>d. CA, USA, 1997.<br />
di-Srefano L.. Melchioni C., Vassura G.. Haptic inrerfmes os aids<br />
<strong>for</strong> <strong>visually</strong> impnired persou, 81h-IEEE-Inlemational-Workshopon-Robol-and-Human-Inferaction.-RO-MAN-P9-C~t.-<br />
Na99TH8483. 1999 2914. IEEE, Piscamway. NJ, USA<br />
Virense H.S.. Jack0 J.A., Emery V.K., Foundorion <strong>for</strong> impoved<br />
inrerncrion by individuals with visual impairmenrs rhrough<br />
mulrimodol feedback. Univenal-Access-in-the-lnfomrauon-<br />
Sociey Nov. 200% XI): 76-87, Springer-Verlag<br />
Tzovaras D.. Niliolakir G., Fergadir 0.. Malasiotis S., Slaw&%<br />
M., Design and implsmenrarion of virruol eiwimnmenr~ <strong>for</strong><br />
rmining of rhc <strong>visually</strong> <strong>impaired</strong>, lacko,-J.-A. (ED). ASSFTS-<br />
2 0 0 2 . - P m e e e ~ g ~ g s - o f - ~ ~ - ~ ~ h - l n t e m a l i o n a<br />
Conferrnce-on-Assistive-Teehnalogies. 2W2 41-8. ACM, New<br />
York NY, USA<br />
E D Kopaeek P., Red-rime L i n u conrrol of0 hopric inrerfo~e<strong>for</strong><br />
visuolly <strong>impaired</strong> persons, <strong>Robot</strong>-Con~ol-ZWO-SYR0C0~.-<br />
~ccdings-uolume-fmm-the-61h-IFAC-Symp~i"~. 2001: 669-<br />
The technologies developed <strong>for</strong> the GRAB system<br />
have demonstrated to be robust and safe. The authors<br />
considered of taking them as a reference p i n t <strong>for</strong> future<br />
systems developments. At present PERCRO is cooperating<br />
with Haptica Ltd in order to offer the benefit and the<br />
advantages of this device to the market.<br />
74 "01.2<br />
Ramstein C.. M d a l 0.. Dufceesne A., Cariyan M., Chasrd P..<br />
Mabilleau P., Touching & hewing. GUIs: Design issues <strong>for</strong> rhe<br />
PC-Access rprcm ASSEI' 96, ACWSIGCAPH. L 2nd Annual<br />
ACM Conference an Assistive Teehnolo@es (pp. 2-9). Vancouver.<br />
BC, Canada<br />
DiFilippo D., Pai D.K.. me MI: on audio and <strong>haptic</strong> inrrrfocc <strong>for</strong><br />
c o t " inrerortions, ULFT.-Proceedingsgs-of-1h~-13~-~"al-<br />
7.Acknowledgments<br />
.'<br />
The activities described in this paper have been<br />
ckried out in collaboration and with the help of the GRAB<br />
consortium. The GRAB consortium is composed of three<br />
European user group: the National Council of Blind of<br />
Ireland (NCBD, The Royal National Institute <strong>for</strong> Blind<br />
A C M - S y m p o r i u m - o o - U s ~ - ~ r - I n f e r f a c e - S o f t w a r e ~ ~ ,<br />
2000: 149-58, ACM. New York, NY. USA<br />
Jansson G., Billbergs K.. et Al.. Haptic Virrul Ofviro-nrs<strong>for</strong><br />
Blind People: ~xplororory Erperimnrr wirh Two Devices,<br />
lntematioaal Joumal of Vinual Reality, 1999 4.10-20<br />
Gosselin E, Riwan A., Design of Virruose 3D; a new hoptic<br />
<strong>interface</strong> <strong>for</strong> nleoparorion and v i n u l rea1i.y. Bejczy,-A.-K.;<br />
Korlowski-K.; Rudas.-L-l., 10th-International-Conferenceim-<br />
Advanced-<strong>Robot</strong>ics.-ICAR-2001, 2001: pp205-12, Budapest<br />
(RNIB) and ONCE (Organization National de Ciecos de<br />
Espana), the Spanish organization of Blind <strong>people</strong>: two<br />
technical developers: PERCRO and the LABEIN<br />
foundation of Spain; and one commercial partner: Haptica<br />
LtD (Dublin).<br />
The authors are grateful the whole consortium <strong>for</strong><br />
their contribution in the development of the activities. The<br />
activities of this project have been canied on with the<br />
[I31<br />
I141<br />
Polytechnic. Budapest, Hungary<br />
Robem J.C.. Franhlio K.M., Cullinane I., Virtual <strong>haptic</strong><br />
exploraron visuolimion of line graphs ond chnns, Roceedingso<br />
f - t h e - S P ~ ~ ~ - I n t u n a t i o n a l - S o c i e t y f o r - ~ ~ .<br />
2002:4660:401-10<br />
Bianchi E., Dozio L. Ghuinghelli G.L. Mantegazza P., Complex<br />
Conrrol Sysrem, Applications of DIAPM-RT4J or DIAPM,<br />
Realtime Linux Workhop Vienna 1999<br />
170