

TMCL™ Firmware Manual - Trinamic
TMCL™ Firmware Manual - Trinamic
TMCL™ Firmware Manual - Trinamic

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
PD-109-57 V2 TMCL <strong>Firmware</strong> <strong>Manual</strong> (V1.00/2010-FEB-18) 54<br />
6.7.14 SIO (set output)<br />
This command sets the status of the general digital output either to low (0) or to high (1).<br />
Internal function: The passed value is transferred to the specified output line.<br />
Related commands: GIO, WAIT<br />
Mnemonic: SIO , , <br />
Binary representation:<br />
INSTRUCTION NO. TYPE MOT/BANK VALUE<br />
14 <br />
Reply structure:<br />
STATUS VALUE<br />
100 – OK (don't care)<br />
Example:<br />
Set OUT_1 to high (bank 2, output 1; general purpose output)<br />
Mnemonic: SIO 0, 2, 1<br />
Binary:<br />
Byte Index 0 1 2 3 4 5 6 7 8<br />
Function Target- Instruction Type Motor/ Operand Operand Operand Operand Checksum<br />
address Number<br />
Bank Byte3 Byte2 Byte1 Byte0<br />
Value (hex) $01 $0e $00 $02 $00 $00 $00 $01 $12<br />
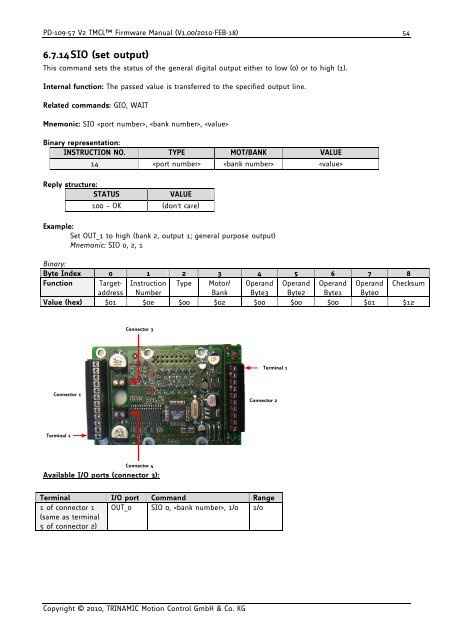
Connector 1<br />
Terminal 1<br />
Connector 3<br />
Connector 4<br />
Available I/O ports (connector 3):<br />
Copyright © 2010, TRINAMIC Motion Control GmbH & Co. KG<br />
Terminal 1<br />
Connector 2<br />
Terminal I/O port Command Range<br />
1 of connector 1<br />
(same as terminal<br />
5 of connector 2)<br />
OUT_0 SIO 0, , 1/0 1/0














