

Etude des marchés d'assurance non-vie à l'aide d'équilibres de ...
Etude des marchés d'assurance non-vie à l'aide d'équilibres de ...
Etude des marchés d'assurance non-vie à l'aide d'équilibres de ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
tel-00703797, version 2 - 7 Jun 2012<br />
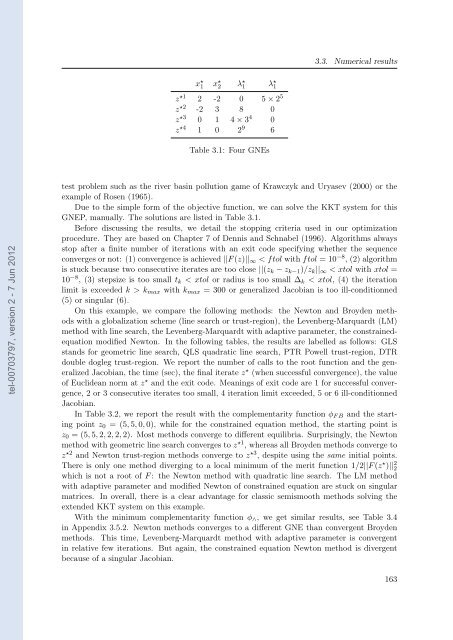
x ⋆ 1 x⋆ 2 λ ⋆ 1 λ ⋆ 1<br />
z ⋆1 2 -2 0 5 × 2 5<br />
z ⋆2 -2 3 8 0<br />
z ⋆3 0 1 4 × 3 4 0<br />
z ⋆4 1 0 2 9 6<br />
Table 3.1: Four GNEs<br />
3.3. Numerical results<br />
test problem such as the river basin pollution game of Krawczyk and Uryasev (2000) or the<br />
example of Rosen (1965).<br />
Due to the simple form of the objective function, we can solve the KKT system for this<br />
GNEP, manually. The solutions are listed in Table 3.1.<br />
Before discussing the results, we <strong>de</strong>tail the stopping criteria used in our optimization<br />
procedure. They are based on Chapter 7 of Dennis and Schnabel (1996). Algorithms always<br />
stop after a finite number of iterations with an exit co<strong>de</strong> specifying whether the sequence<br />
converges or not: (1) convergence is achieved ||F (z)||∞ < ftol with ftol = 10 −8 , (2) algorithm<br />
is stuck because two consecutive iterates are too close ||(zk − zk−1)/zk||∞ < xtol with xtol =<br />
10 −8 , (3) stepsize is too small tk < xtol or radius is too small ∆k < xtol, (4) the iteration<br />
limit is excee<strong>de</strong>d k > kmax with kmax = 300 or generalized Jacobian is too ill-conditionned<br />
(5) or singular (6).<br />
On this example, we compare the following methods: the Newton and Broy<strong>de</strong>n methods<br />
with a globalization scheme (line search or trust-region), the Levenberg-Marquardt (LM)<br />
method with line search, the Levenberg-Marquardt with adaptive parameter, the constraine<strong>de</strong>quation<br />
modified Newton. In the following tables, the results are labelled as follows: GLS<br />
stands for geometric line search, QLS quadratic line search, PTR Powell trust-region, DTR<br />
double dogleg trust-region. We report the number of calls to the root function and the generalized<br />
Jacobian, the time (sec), the final iterate z ⋆ (when successful convergence), the value<br />
of Eucli<strong>de</strong>an norm at z ⋆ and the exit co<strong>de</strong>. Meanings of exit co<strong>de</strong> are 1 for successful convergence,<br />
2 or 3 consecutive iterates too small, 4 iteration limit excee<strong>de</strong>d, 5 or 6 ill-conditionned<br />
Jacobian.<br />
In Table 3.2, we report the result with the complementarity function φF B and the starting<br />
point z0 = (5, 5, 0, 0), while for the constrained equation method, the starting point is<br />
z0 = (5, 5, 2, 2, 2, 2). Most methods converge to different equilibria. Surprisingly, the Newton<br />
method with geometric line search converges to z ⋆1 , whereas all Broy<strong>de</strong>n methods converge to<br />
z ⋆2 and Newton trust-region methods converge to z ⋆3 , <strong><strong>de</strong>s</strong>pite using the same initial points.<br />
There is only one method diverging to a local minimum of the merit function 1/2||F (z ⋆ )|| 2 2<br />
which is not a root of F : the Newton method with quadratic line search. The LM method<br />
with adaptive parameter and modified Newton of constrained equation are stuck on singular<br />
matrices. In overall, there is a clear advantage for classic semismooth methods solving the<br />
exten<strong>de</strong>d KKT system on this example.<br />
With the minimum complementarity function φ∧, we get similar results, see Table 3.4<br />
in Appendix 3.5.2. Newton methods converges to a different GNE than convergent Broy<strong>de</strong>n<br />
methods. This time, Levenberg-Marquardt method with adaptive parameter is convergent<br />
in relative few iterations. But again, the constrained equation Newton method is divergent<br />
because of a singular Jacobian.<br />
163













