ENTANGLEMENT OF GAUSSIAN STATES Gerardo Adesso
ENTANGLEMENT OF GAUSSIAN STATES Gerardo Adesso ENTANGLEMENT OF GAUSSIAN STATES Gerardo Adesso
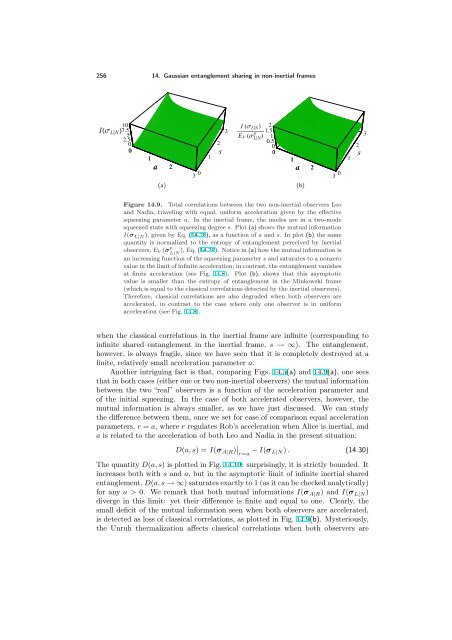
256 14. Gaussian entanglement sharing in non-inertial frames 2.5 0 0 5 10 IΣLN 7.5 0 1 a (a) 2 3 0 1 2 s 3 0.5 0 0 1 1.5 2 IΣLN p EVΣLN 0 1 a (b) 2 3 0 Figure 14.9. Total correlations between the two non-inertial observers Leo and Nadia, traveling with equal, uniform acceleration given by the effective squeezing parameter a. In the inertial frame, the modes are in a two-mode squeezed state with squeezing degree s. Plot (a) shows the mutual information I(σL|N ), given by Eq. (14.28), as a function of a and s. In plot (b) the same quantity is normalized to the entropy of entanglement perceived by inertial observers, EV (σ p ), Eq. (14.29). Notice in (a) how the mutual information is L|N an increasing function of the squeezing parameter s and saturates to a nonzero value in the limit of infinite acceleration; in contrast, the entanglement vanishes at finite acceleration (see Fig. 14.8). Plot (b), shows that this asymptotic value is smaller than the entropy of entanglement in the Minkowski frame (which is equal to the classical correlations detected by the inertial observers). Therefore, classical correlations are also degraded when both observers are accelerated, in contrast to the case where only one observer is in uniform acceleration (see Fig. 14.8). when the classical correlations in the inertial frame are infinite (corresponding to infinite shared entanglement in the inertial frame, s → ∞). The entanglement, however, is always fragile, since we have seen that it is completely destroyed at a finite, relatively small acceleration parameter a. Another intriguing fact is that, comparing Figs. 14.5(a) and 14.9(a), one sees that in both cases (either one or two non-inertial observers) the mutual information between the two “real” observers is a function of the acceleration parameter and of the initial squeezing. In the case of both accelerated observers, however, the mutual information is always smaller, as we have just discussed. We can study the difference between them, once we set for ease of comparison equal acceleration parameters, r = a, where r regulates Rob’s acceleration when Alice is inertial, and a is related to the acceleration of both Leo and Nadia in the present situation: D(a, s) = I(σ A|R) r=a − I(σ L|N) . (14.30) The quantity D(a, s) is plotted in Fig. 14.10: surprisingly, it is strictly bounded. It increases both with s and a, but in the asymptotic limit of infinite inertial shared entanglement, D(a, s → ∞) saturates exactly to 1 (as it can be checked analytically) for any a > 0. We remark that both mutual informations I(σ A|R) and I(σ L|N) diverge in this limit: yet their difference is finite and equal to one. Clearly, the small deficit of the mutual information seen when both observers are accelerated, is detected as loss of classical correlations, as plotted in Fig. 14.9(b). Mysteriously, the Unruh thermalization affects classical correlations when both observers are 1 2 s 3
4 3 a 2 1 14.4. Discussion and outlook 257 0 0 1 2 3 s 1 0.75 0.5 IΣABraIΣLN 0.25 0 4 Figure 14.10. Plot, as a function of the acceleration parameter a and the squeezing parameter s, of the difference between the mutual information shared by the inertial Alice and the non-inertial Rob, and the mutual information shared by the uniformly accelerating Leo and Nadia, as given by Eq. (14.30). accelerated: however, it degrades at most one absolute unit of classical correlations. This means that in the case when both Leo and Nadia escape the fall into a black hole, not only their entanglement is degraded but there is also a loss of classical information. 14.4. Discussion and outlook In this Chapter, based on Ref. [GA20], we presented a thorough study of classical and quantum correlations between modes of a scalar field measured by observers in relative acceleration. By considering the state of the field in the inertial frame in the simplest multi-mode squeezed state possible (the two-mode case) we were able to investigate in detail the entanglement in all partitions of the system. We considered two observers carrying single mode detectors and discussed the correlations on their measurements when both observers are in uniform acceleration and when only one of them is non-inertial. We find that in both settings entanglement is degraded with acceleration and we explain this degradation as an effect of re-distribution of the entanglement measured in an inertial frame. Our main results can be summarized as follows. When one of the observers is non-inertial the entanglement lost between the modes measured by him and the inertial observer is re-distributed in tripartite correlations. No entanglement is generated between the modes measured by the inertial observer and the modes in the causally disconnected region II. This shows that indeed the behavior for bosonic fields is very different to the Dirac case where the entanglement lost in the noninertial frame is re-distributed not into tripartite correlations but into bipartite correlations between the mode measured by the inertial observer and the mode in region II. The analysis of the mutual information shows that in this case classical correlations are conserved independently of the acceleration. The situation changes drastically by considering that both observers are non-inertial. In this case the entanglement lost between two non-inertial observers is re-distributed into mainly four-partite correlations although some tripartite correlations exist for finite acceleration. The surprising result here (though expected in the framework of distributed entanglement, as the additional fourth mode comes into play) is that entanglement vanishes completely at a finite acceleration. This is also strikingly different to the
- Page 220 and 221: 206 12. Multiparty quantum communic
- Page 222 and 223: 208 12. Multiparty quantum communic
- Page 224 and 225: 210 12. Multiparty quantum communic
- Page 226 and 227: 212 12. Multiparty quantum communic
- Page 228 and 229: 214 12. Multiparty quantum communic
- Page 230 and 231: 216 12. Multiparty quantum communic
- Page 233 and 234: CHAPTER 13 Entanglement in Gaussian
- Page 235 and 236: 13.1. Gaussian valence bond states
- Page 237 and 238: Eq. (13.3) thus takes the form 13.1
- Page 239 and 240: 13.2. Entanglement distribution in
- Page 241 and 242: s 20 17.5 15 12.5 10 7.5 5 2.5 13.2
- Page 243 and 244: 13.3. Optical implementation of Gau
- Page 245 and 246: of the form Eq. (13.1), with 13.3.
- Page 247 and 248: 13.4. Telecloning with Gaussian val
- Page 249 and 250: CHAPTER 14 Gaussian entanglement sh
- Page 251 and 252: 14.1. Entanglement in non-inertial
- Page 253 and 254: 14.2. Distributed Gaussian entangle
- Page 255 and 256: 14.2. Distributed Gaussian entangle
- Page 257 and 258: 14.2. Distributed Gaussian entangle
- Page 259 and 260: 6 s 4 14.2. Distributed Gaussian en
- Page 261 and 262: 2.5 0 0 5 10 IΣAR7.5 0 14.3. Distr
- Page 263 and 264: 14.3. Distributed Gaussian entangle
- Page 265 and 266: 0 entanglement condition 14.3. Dist
- Page 267 and 268: 14.3. Distributed Gaussian entangle
- Page 269: 14.3. Distributed Gaussian entangle
- Page 273: Part VI Closing remarks Entanglemen
- Page 276 and 277: 262 Conclusion and Outlook Gaussian
- Page 278 and 279: 264 Conclusion and Outlook compass
- Page 280 and 281: 266 A. Standard forms of pure Gauss
- Page 282 and 283: 268 A. Standard forms of pure Gauss
- Page 284 and 285: 270 A. Standard forms of pure Gauss
- Page 286 and 287: 272 List of Publications [GA11] G.
- Page 288 and 289: 274 Bibliography [23] C. H. Bennett
- Page 290 and 291: 276 Bibliography [79] J. Eisert, C.
- Page 292 and 293: 278 Bibliography [140] J. Laurat, T
- Page 294 and 295: 280 Bibliography [198] T. Roscilde,
- Page 296: 282 Bibliography [258] J. Von Neuma
256 14. Gaussian entanglement sharing in non-inertial frames<br />
2.5<br />
0<br />
0<br />
5<br />
10<br />
IΣLN 7.5<br />
0<br />
1<br />
a<br />
(a)<br />
2<br />
3<br />
0<br />
1<br />
2<br />
s<br />
3<br />
0.5<br />
0<br />
0<br />
1<br />
1.5 2 IΣLN<br />
p<br />
EVΣLN 0<br />
1<br />
a<br />
(b)<br />
2<br />
3<br />
0<br />
Figure 14.9. Total correlations between the two non-inertial observers Leo<br />
and Nadia, traveling with equal, uniform acceleration given by the effective<br />
squeezing parameter a. In the inertial frame, the modes are in a two-mode<br />
squeezed state with squeezing degree s. Plot (a) shows the mutual information<br />
I(σL|N ), given by Eq. (14.28), as a function of a and s. In plot (b) the same<br />
quantity is normalized to the entropy of entanglement perceived by inertial<br />
observers, EV (σ p<br />
), Eq. (14.29). Notice in (a) how the mutual information is<br />
L|N<br />
an increasing function of the squeezing parameter s and saturates to a nonzero<br />
value in the limit of infinite acceleration; in contrast, the entanglement vanishes<br />
at finite acceleration (see Fig. 14.8). Plot (b), shows that this asymptotic<br />
value is smaller than the entropy of entanglement in the Minkowski frame<br />
(which is equal to the classical correlations detected by the inertial observers).<br />
Therefore, classical correlations are also degraded when both observers are<br />
accelerated, in contrast to the case where only one observer is in uniform<br />
acceleration (see Fig. 14.8).<br />
when the classical correlations in the inertial frame are infinite (corresponding to<br />
infinite shared entanglement in the inertial frame, s → ∞). The entanglement,<br />
however, is always fragile, since we have seen that it is completely destroyed at a<br />
finite, relatively small acceleration parameter a.<br />
Another intriguing fact is that, comparing Figs. 14.5(a) and 14.9(a), one sees<br />
that in both cases (either one or two non-inertial observers) the mutual information<br />
between the two “real” observers is a function of the acceleration parameter and<br />
of the initial squeezing. In the case of both accelerated observers, however, the<br />
mutual information is always smaller, as we have just discussed. We can study<br />
the difference between them, once we set for ease of comparison equal acceleration<br />
parameters, r = a, where r regulates Rob’s acceleration when Alice is inertial, and<br />
a is related to the acceleration of both Leo and Nadia in the present situation:<br />
D(a, s) = I(σ A|R) r=a − I(σ L|N) . (14.30)<br />
The quantity D(a, s) is plotted in Fig. 14.10: surprisingly, it is strictly bounded. It<br />
increases both with s and a, but in the asymptotic limit of infinite inertial shared<br />
entanglement, D(a, s → ∞) saturates exactly to 1 (as it can be checked analytically)<br />
for any a > 0. We remark that both mutual informations I(σ A|R) and I(σ L|N)<br />
diverge in this limit: yet their difference is finite and equal to one. Clearly, the<br />
small deficit of the mutual information seen when both observers are accelerated,<br />
is detected as loss of classical correlations, as plotted in Fig. 14.9(b). Mysteriously,<br />
the Unruh thermalization affects classical correlations when both observers are<br />
1<br />
2<br />
s<br />
3


