Technical documentation
Technical documentation
Technical documentation

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
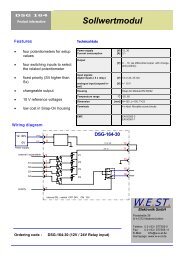
Block diagram<br />
POS-123<br />
3,5 mm JISC-6560<br />
Ramp time<br />
24V<br />
3<br />
24 V<br />
DC<br />
10<br />
9<br />
0..10V<br />
command speed<br />
4<br />
0 V<br />
RS232 C<br />
9600 Baud<br />
1 Stopbit<br />
no parity<br />
V<br />
vramp x <br />
x = 1...2000<br />
0V<br />
DC<br />
0 V<br />
0 V<br />
11<br />
Power supply<br />
W.E.ST. Elektronik GmbH<br />
Differential input<br />
of the actuator<br />
Acceleration A<br />
Deceleration A<br />
Input selector<br />
13<br />
15<br />
Output: A (0..10)V<br />
a:i x <br />
i = A<br />
x = 1...2000 ms<br />
d:i x <br />
i = A<br />
x = 10...10000<br />
ain:i a b c x <br />
i = W<br />
0..10V<br />
4..20mA<br />
Command<br />
position<br />
16<br />
a,b,c = -10000...10000<br />
x = V|C<br />
11<br />
0 V<br />
0 V<br />
Output: B (0..10)V<br />
a:i x <br />
i = B<br />
x = 1...2000 ms<br />
d:i x <br />
i = B<br />
x = 10...10000<br />
14<br />
12<br />
Valve adaptation<br />
vs x <br />
x = EXT | INT<br />
velo x <br />
x = 1000...10000<br />
min:i x <br />
i = A|B<br />
x = 0..5000<br />
max:i x <br />
i = A|B<br />
x = 5000..10000<br />
trigger x <br />
x = 0..2000<br />
pol x <br />
x = +|-<br />
offset x <br />
x = -2000... 2000<br />
XW<br />
W<br />
U<br />
Input selector<br />
X<br />
ain:i a b c x <br />
i = X<br />
0..10V<br />
4..20mA<br />
Feedback<br />
position<br />
Acceleration B<br />
Deceleration B<br />
a,b,c = -10000...10000<br />
x = V|C<br />
11<br />
Seite 8 von 24<br />
I version: 4... 20 mA output<br />
PIN 15 to PIN 12<br />
0 V<br />
0 V<br />
Ready<br />
1<br />
24 V output<br />
Control program<br />
24 V input<br />
8<br />
Enable<br />
InPos<br />
2<br />
24 V output<br />
24 V input<br />
7<br />
Start<br />
PE via DIN-RAIL<br />
SUPPORT DIAGNOSTICS CONFIGURATION<br />
save din inpos x (x = 0..2000)<br />
loadback x ctrl x (x = LIN|SQRT1|SQRT2)<br />
help w sens x (x = ON|OFF)<br />
para xw hand:i x (i = A|B, x = -10000..10000)<br />
default u vmode x (x = ON|OFF)<br />
v th x (x = 100...60000)<br />
24 V input<br />
6<br />
Hand +<br />
24 V input<br />
5<br />
Hand -