Non-dispersive wave packets in periodically driven quantum systems
Non-dispersive wave packets in periodically driven quantum systems
Non-dispersive wave packets in periodically driven quantum systems

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
496 A. Buchleitner et al. / Physics Reports 368 (2002) 409–547<br />
F 0<br />
4<br />
2<br />
0<br />
-2<br />
-4<br />
-2 -1 0 1 2<br />
ωc /ω<br />
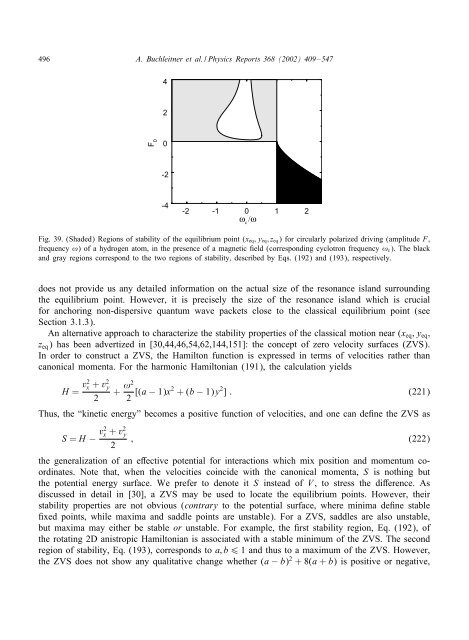
Fig. 39. (Shaded) Regions of stability of the equilibrium po<strong>in</strong>t (xeq;yeq;zeq) for circularly polarized driv<strong>in</strong>g (amplitude F,<br />
frequency !) of a hydrogen atom, <strong>in</strong> the presence of a magnetic eld (correspond<strong>in</strong>g cyclotron frequency !c). The black<br />
and gray regions correspond to the two regions of stability, described by Eqs. (192) and (193), respectively.<br />
does not provide us any detailed <strong>in</strong>formation on the actual size of the resonance island surround<strong>in</strong>g<br />
the equilibrium po<strong>in</strong>t. However, it is precisely the size of the resonance island which is crucial<br />
for anchor<strong>in</strong>g non-<strong>dispersive</strong> <strong>quantum</strong> <strong>wave</strong> <strong>packets</strong> close to the classical equilibrium po<strong>in</strong>t (see<br />
Section 3.1.3).<br />
An alternative approach to characterize the stability properties of the classical motion near (xeq;yeq;<br />
zeq) has been advertized <strong>in</strong> [30,44,46,54,62,144,151]: the concept of zero velocity surfaces (ZVS).<br />
In order to construct a ZVS, the Hamilton function is expressed <strong>in</strong> terms of velocities rather than<br />
canonical momenta. For the harmonic Hamiltonian (191), the calculation yields<br />
H = v2 x + v2 y !2<br />
+<br />
2 2 [(a − 1)x2 +(b− 1)y 2 ] : (221)<br />
Thus, the “k<strong>in</strong>etic energy” becomes a positive function of velocities, and one can de ne the ZVS as<br />
S = H − v2 x + v 2 y<br />
2<br />
; (222)<br />
the generalization of an e ective potential for <strong>in</strong>teractions which mix position and momentum coord<strong>in</strong>ates.<br />
Note that, when the velocities co<strong>in</strong>cide with the canonical momenta, S is noth<strong>in</strong>g but<br />
the potential energy surface. We prefer to denote it S <strong>in</strong>stead of V , to stress the di erence. As<br />
discussed <strong>in</strong> detail <strong>in</strong> [30], a ZVS may be used to locate the equilibrium po<strong>in</strong>ts. However, their<br />
stability properties are not obvious (contrary to the potential surface, where m<strong>in</strong>ima de ne stable<br />
xed po<strong>in</strong>ts, while maxima and saddle po<strong>in</strong>ts are unstable). For a ZVS, saddles are also unstable,<br />
but maxima may either be stable or unstable. For example, the rst stability region, Eq. (192), of<br />
the rotat<strong>in</strong>g 2D anistropic Hamiltonian is associated with a stable m<strong>in</strong>imum of the ZVS. The second<br />
region of stability, Eq. (193), corresponds to a; b 6 1 and thus to a maximum of the ZVS. However,<br />
the ZVS does not show any qualitative change whether (a − b) 2 +8(a + b) is positive or negative,