

CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
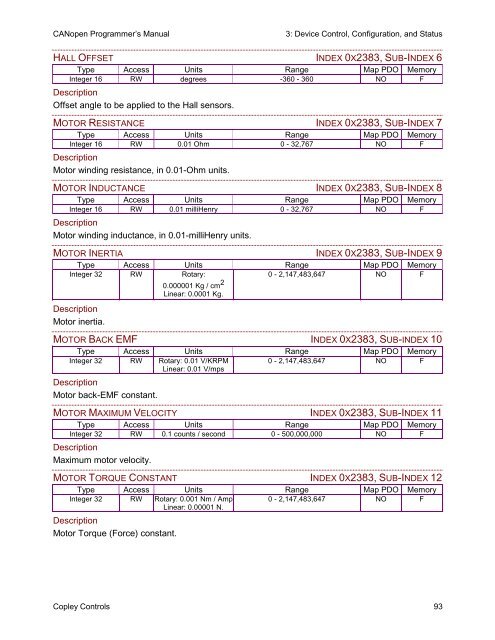
<strong>CANopen</strong> Programmer’s <strong>Manual</strong> 3: Device Control, Configuration, and Status<br />
HALL OFFSET INDEX 0X2383, SUB-INDEX 6<br />
Type Access Units Range Map PDO Memory<br />
Integer 16 RW <strong>de</strong>grees -360 - 360 NO F<br />
Description<br />
Offset angle to be applied to the Hall sensors.<br />
MOTOR RESISTANCE INDEX 0X2383, SUB-INDEX 7<br />
Type Access Units Range Map PDO Memory<br />
Integer 16 RW 0.01 Ohm 0 - 32,767 NO F<br />
Description<br />
Motor winding resistance, in 0.01-Ohm units.<br />
MOTOR INDUCTANCE INDEX 0X2383, SUB-INDEX 8<br />
Type Access Units Range Map PDO Memory<br />
Integer 16 RW 0.01 milliHenry 0 - 32,767 NO F<br />
Description<br />
Motor winding inductance, in 0.01-milliHenry units.<br />
MOTOR INERTIA INDEX 0X2383, SUB-INDEX 9<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RW Rotary:<br />
0.000001 Kg / cm 2<br />
Linear: 0.0001 Kg.<br />
0 - 2,147,483,647 NO F<br />
Description<br />
Motor inertia.<br />
MOTOR BACK EMF INDEX 0X2383, SUB-INDEX 10<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RW Rotary: 0.01 V/KRPM<br />
Linear: 0.01 V/mps<br />
0 - 2,147,483,647 NO F<br />
Description<br />
Motor back-EMF constant.<br />
MOTOR MAXIMUM VELOCITY INDEX 0X2383, SUB-INDEX 11<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RW 0.1 counts / second 0 - 500,000,000 NO F<br />
Description<br />
Maximum motor velocity.<br />
MOTOR TORQUE CONSTANT INDEX 0X2383, SUB-INDEX 12<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RW Rotary: 0.001 Nm / Amp<br />
Linear: 0.00001 N.<br />
0 - 2,147,483,647 NO F<br />
Description<br />
Motor Torque (Force) constant.<br />
Copley Controls 93













