

CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>CANopen</strong> Programmer’s <strong>Manual</strong> 3: Device Control, Configuration, and Status<br />
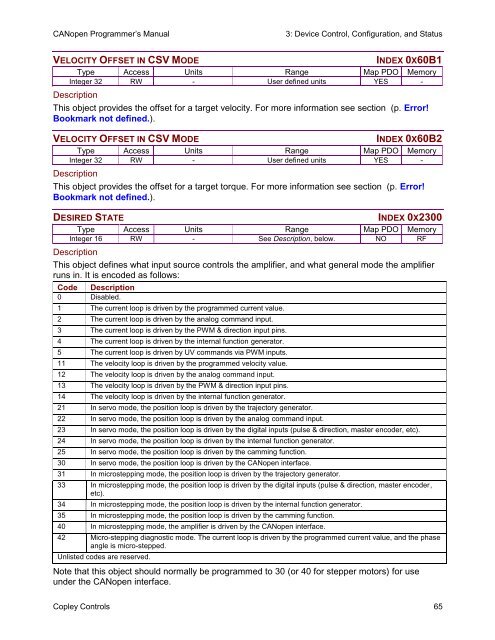
VELOCITY OFFSET IN CSV MODE INDEX 0X60B1<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RW - User <strong>de</strong>fined units YES -<br />
Description<br />
This object provi<strong>de</strong>s the offset for a target velocity. For more information see section (p. Error!<br />
Bookmark not <strong>de</strong>fined.).<br />
VELOCITY OFFSET IN CSV MODE INDEX 0X60B2<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RW - User <strong>de</strong>fined units YES -<br />
Description<br />
This object provi<strong>de</strong>s the offset for a target torque. For more information see section (p. Error!<br />
Bookmark not <strong>de</strong>fined.).<br />
DESIRED STATE INDEX 0X2300<br />
Type Access Units Range Map PDO Memory<br />
Integer 16 RW - See Description, below. NO RF<br />
Description<br />
This object <strong>de</strong>fines what input source controls the amplifier, and what general mo<strong>de</strong> the amplifier<br />
runs in. It is enco<strong>de</strong>d as follows:<br />
Co<strong>de</strong> Description<br />
0 Disabled.<br />
1 The current loop is driven by the programmed current value.<br />
2 The current loop is driven by the analog command input.<br />
3 The current loop is driven by the PWM & direction input pins.<br />
4 The current loop is driven by the internal function generator.<br />
5 The current loop is driven by UV commands via PWM inputs.<br />
11 The velocity loop is driven by the programmed velocity value.<br />
12 The velocity loop is driven by the analog command input.<br />
13 The velocity loop is driven by the PWM & direction input pins.<br />
14 The velocity loop is driven by the internal function generator.<br />
21 In servo mo<strong>de</strong>, the position loop is driven by the trajectory generator.<br />
22 In servo mo<strong>de</strong>, the position loop is driven by the analog command input.<br />
23 In servo mo<strong>de</strong>, the position loop is driven by the digital inputs (pulse & direction, master enco<strong>de</strong>r, etc).<br />
24 In servo mo<strong>de</strong>, the position loop is driven by the internal function generator.<br />
25 In servo mo<strong>de</strong>, the position loop is driven by the camming function.<br />
30 In servo mo<strong>de</strong>, the position loop is driven by the <strong>CANopen</strong> interface.<br />
31 In microstepping mo<strong>de</strong>, the position loop is driven by the trajectory generator.<br />
33 In microstepping mo<strong>de</strong>, the position loop is driven by the digital inputs (pulse & direction, master enco<strong>de</strong>r,<br />
etc).<br />
34 In microstepping mo<strong>de</strong>, the position loop is driven by the internal function generator.<br />
35 In microstepping mo<strong>de</strong>, the position loop is driven by the camming function.<br />
40 In microstepping mo<strong>de</strong>, the amplifier is driven by the <strong>CANopen</strong> interface.<br />
42 Micro-stepping diagnostic mo<strong>de</strong>. The current loop is driven by the programmed current value, and the phase<br />
angle is micro-stepped.<br />
Unlisted co<strong>de</strong>s are reserved.<br />
Note that this object should normally be programmed to 30 (or 40 for stepper motors) for use<br />
un<strong>de</strong>r the <strong>CANopen</strong> interface.<br />
Copley Controls 65













