

CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3: Device Control, Configuration, and Status <strong>CANopen</strong> Programmer’s <strong>Manual</strong><br />
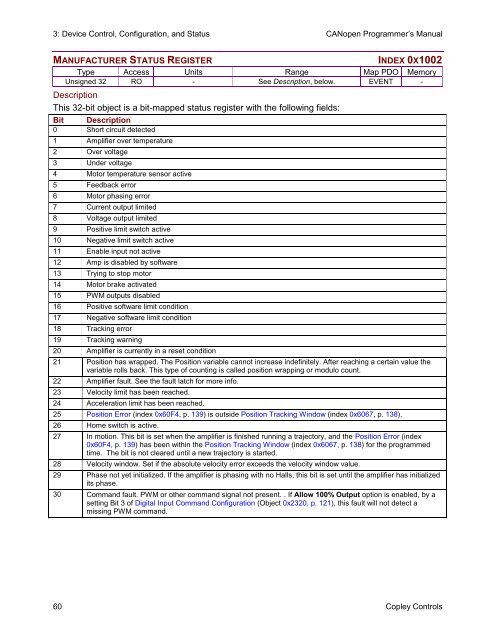
MANUFACTURER STATUS REGISTER INDEX 0X1002<br />
Type Access Units Range Map PDO Memory<br />
Unsigned 32 RO - See Description, below. EVENT -<br />
Description<br />
This 32-bit object is a bit-mapped status register with the following fields:<br />
Bit Description<br />
0 Short circuit <strong>de</strong>tected<br />
1 Amplifier over temperature<br />
2 Over voltage<br />
3 Un<strong>de</strong>r voltage<br />
4 Motor temperature sensor active<br />
5 Feedback error<br />
6 Motor phasing error<br />
7 Current output limited<br />
8 Voltage output limited<br />
9 Positive limit switch active<br />
10 Negative limit switch active<br />
11 Enable input not active<br />
12 Amp is disabled by software<br />
13 Trying to stop motor<br />
14 Motor brake activated<br />
15 PWM outputs disabled<br />
16 Positive software limit condition<br />
17 Negative software limit condition<br />
18 Tracking error<br />
19 Tracking warning<br />
20 Amplifier is currently in a reset condition<br />
21 Position has wrapped. The Position variable cannot increase in<strong>de</strong>finitely. After reaching a certain value the<br />
variable rolls back. This type of counting is called position wrapping or modulo count.<br />
22 Amplifier fault. See the fault latch for more info.<br />
23 Velocity limit has been reached.<br />
24 Acceleration limit has been reached.<br />
25 Position Error (in<strong>de</strong>x 0x60F4, p. 139) is outsi<strong>de</strong> Position Tracking Window (in<strong>de</strong>x 0x6067, p. 138).<br />
26 Home switch is active.<br />
27 In motion. This bit is set when the amplifier is finished running a trajectory, and the Position Error (in<strong>de</strong>x<br />
0x60F4, p. 139) has been within the Position Tracking Window (in<strong>de</strong>x 0x6067, p. 138) for the programmed<br />
time. The bit is not cleared until a new trajectory is started.<br />
28 Velocity window. Set if the absolute velocity error exceeds the velocity window value.<br />
29 Phase not yet initialized. If the amplifier is phasing with no Halls, this bit is set until the amplifier has initialized<br />
its phase.<br />
30 Command fault. PWM or other command signal not present. . If Allow 100% Output option is enabled, by a<br />
setting Bit 3 of Digital Input Command Configuration (Object 0x2320, p. 121), this fault will not <strong>de</strong>tect a<br />
missing PWM command.<br />
60 Copley Controls













