

CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6: Homing Mo<strong>de</strong> Operation <strong>CANopen</strong> Programmer’s <strong>Manual</strong><br />
Homing Overview<br />
Homing is the method by which a drive seeks the home position (also called the datum, reference<br />
point, or zero point). There are various methods of achieving this using:<br />
limit switches at the ends of travel, or<br />
a <strong>de</strong>dicated home switch.<br />
Most of the methods also use the in<strong>de</strong>x pulse input from an incremental enco<strong>de</strong>r.<br />
The amplifier performs homing operations in Homing Mo<strong>de</strong> (Mo<strong>de</strong> Of Operation [in<strong>de</strong>x 0x6060, p.<br />
64] =6).<br />
The Homing Function<br />
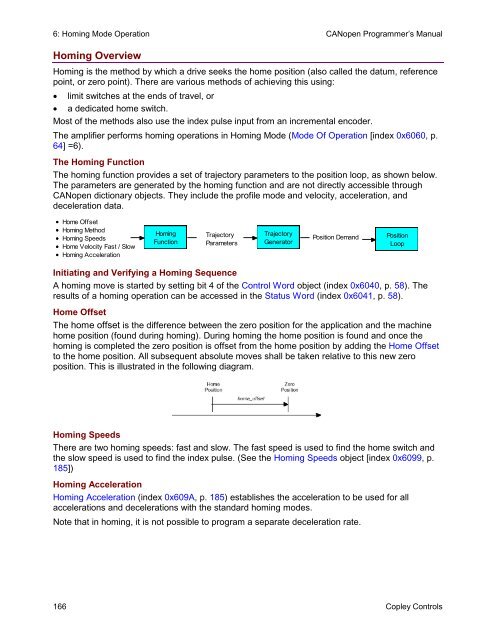
The homing function provi<strong>de</strong>s a set of trajectory parameters to the position loop, as shown below.<br />
The parameters are generated by the homing function and are not directly accessible through<br />
<strong>CANopen</strong> dictionary objects. They inclu<strong>de</strong> the profile mo<strong>de</strong> and velocity, acceleration, and<br />
<strong>de</strong>celeration data.<br />
Home Offset<br />
Homing Method<br />
Homing Speeds<br />
Home Velocity Fast / Slow<br />
Homing Acceleration<br />
Homing<br />
Function<br />
Trajectory<br />
Parameters<br />
Trajectory<br />
Generator<br />
Position Demand<br />
Position<br />
Loop<br />
Initiating and Verifying a Homing Sequence<br />
A homing move is started by setting bit 4 of the Control Word object (in<strong>de</strong>x 0x6040, p. 58). The<br />
results of a homing operation can be accessed in the Status Word (in<strong>de</strong>x 0x6041, p. 58).<br />
Home Offset<br />
The home offset is the difference between the zero position for the application and the machine<br />
home position (found during homing). During homing the home position is found and once the<br />
homing is completed the zero position is offset from the home position by adding the Home Offset<br />
to the home position. All subsequent absolute moves shall be taken relative to this new zero<br />
position. This is illustrated in the following diagram.<br />
Homing Speeds<br />
There are two homing speeds: fast and slow. The fast speed is used to find the home switch and<br />
the slow speed is used to find the in<strong>de</strong>x pulse. (See the Homing Speeds object [in<strong>de</strong>x 0x6099, p.<br />
185])<br />
Homing Acceleration<br />
Homing Acceleration (in<strong>de</strong>x 0x609A, p. 185) establishes the acceleration to be used for all<br />
accelerations and <strong>de</strong>celerations with the standard homing mo<strong>de</strong>s.<br />
Note that in homing, it is not possible to program a separate <strong>de</strong>celeration rate.<br />
166 Copley Controls













