

CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
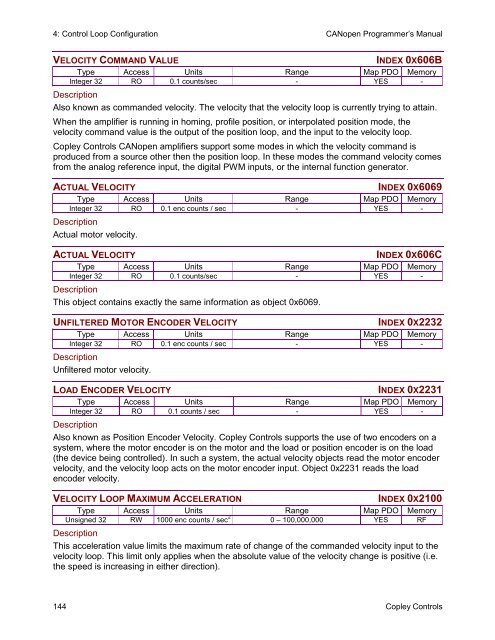
4: Control Loop Configuration <strong>CANopen</strong> Programmer’s <strong>Manual</strong><br />
VELOCITY COMMAND VALUE INDEX 0X606B<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RO 0.1 counts/sec - YES -<br />
Description<br />
Also known as comman<strong>de</strong>d velocity. The velocity that the velocity loop is currently trying to attain.<br />
When the amplifier is running in homing, profile position, or interpolated position mo<strong>de</strong>, the<br />
velocity command value is the output of the position loop, and the input to the velocity loop.<br />
Copley Controls <strong>CANopen</strong> amplifiers support some mo<strong>de</strong>s in which the velocity command is<br />
produced from a source other then the position loop. In these mo<strong>de</strong>s the command velocity comes<br />
from the analog reference input, the digital PWM inputs, or the internal function generator.<br />
ACTUAL VELOCITY INDEX 0X6069<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RO 0.1 enc counts / sec - YES -<br />
Description<br />
Actual motor velocity.<br />
ACTUAL VELOCITY INDEX 0X606C<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RO 0.1 counts/sec - YES -<br />
Description<br />
This object contains exactly the same information as object 0x6069.<br />
UNFILTERED MOTOR ENCODER VELOCITY INDEX 0X2232<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RO 0.1 enc counts / sec - YES -<br />
Description<br />
Unfiltered motor velocity.<br />
LOAD ENCODER VELOCITY INDEX 0X2231<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RO 0.1 counts / sec - YES -<br />
Description<br />
Also known as Position Enco<strong>de</strong>r Velocity. Copley Controls supports the use of two enco<strong>de</strong>rs on a<br />
system, where the motor enco<strong>de</strong>r is on the motor and the load or position enco<strong>de</strong>r is on the load<br />
(the <strong>de</strong>vice being controlled). In such a system, the actual velocity objects read the motor enco<strong>de</strong>r<br />
velocity, and the velocity loop acts on the motor enco<strong>de</strong>r input. Object 0x2231 reads the load<br />
enco<strong>de</strong>r velocity.<br />
VELOCITY LOOP MAXIMUM ACCELERATION INDEX 0X2100<br />
Type Access Units Range Map PDO Memory<br />
Unsigned 32 RW 1000 enc counts / sec 2<br />
0 – 100,000,000 YES RF<br />
Description<br />
This acceleration value limits the maximum rate of change of the comman<strong>de</strong>d velocity input to the<br />
velocity loop. This limit only applies when the absolute value of the velocity change is positive (i.e.<br />
the speed is increasing in either direction).<br />
144 Copley Controls













