

CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de
CANopen Programmer's Manual - Maccon.de

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>CANopen</strong> Programmer’s <strong>Manual</strong> 4: Control Loop Configuration<br />
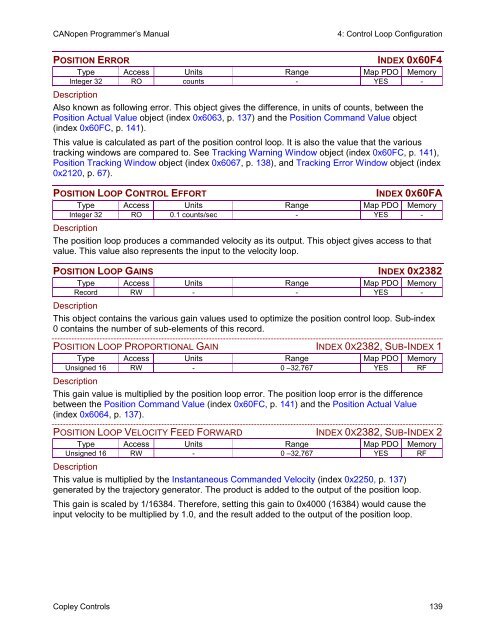
POSITION ERROR INDEX 0X60F4<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RO counts - YES -<br />
Description<br />
Also known as following error. This object gives the difference, in units of counts, between the<br />
Position Actual Value object (in<strong>de</strong>x 0x6063, p. 137) and the Position Command Value object<br />
(in<strong>de</strong>x 0x60FC, p. 141).<br />
This value is calculated as part of the position control loop. It is also the value that the various<br />
tracking windows are compared to. See Tracking Warning Window object (in<strong>de</strong>x 0x60FC, p. 141),<br />
Position Tracking Window object (in<strong>de</strong>x 0x6067, p. 138), and Tracking Error Window object (in<strong>de</strong>x<br />
0x2120, p. 67).<br />
POSITION LOOP CONTROL EFFORT INDEX 0X60FA<br />
Type Access Units Range Map PDO Memory<br />
Integer 32 RO 0.1 counts/sec - YES -<br />
Description<br />
The position loop produces a comman<strong>de</strong>d velocity as its output. This object gives access to that<br />
value. This value also represents the input to the velocity loop.<br />
POSITION LOOP GAINS INDEX 0X2382<br />
Type Access Units Range Map PDO Memory<br />
Record RW - - YES -<br />
Description<br />
This object contains the various gain values used to optimize the position control loop. Sub-in<strong>de</strong>x<br />
0 contains the number of sub-elements of this record.<br />
POSITION LOOP PROPORTIONAL GAIN INDEX 0X2382, SUB-INDEX 1<br />
Type Access Units Range Map PDO Memory<br />
Unsigned 16 RW - 0 –32,767 YES RF<br />
Description<br />
This gain value is multiplied by the position loop error. The position loop error is the difference<br />
between the Position Command Value (in<strong>de</strong>x 0x60FC, p. 141) and the Position Actual Value<br />
(in<strong>de</strong>x 0x6064, p. 137).<br />
POSITION LOOP VELOCITY FEED FORWARD INDEX 0X2382, SUB-INDEX 2<br />
Type Access Units Range Map PDO Memory<br />
Unsigned 16 RW - 0 –32,767 YES RF<br />
Description<br />
This value is multiplied by the Instantaneous Comman<strong>de</strong>d Velocity (in<strong>de</strong>x 0x2250, p. 137)<br />
generated by the trajectory generator. The product is ad<strong>de</strong>d to the output of the position loop.<br />
This gain is scaled by 1/16384. Therefore, setting this gain to 0x4000 (16384) would cause the<br />
input velocity to be multiplied by 1.0, and the result ad<strong>de</strong>d to the output of the position loop.<br />
Copley Controls 139













