

Copley amplifier parameter dictionary - Maccon.de
Copley amplifier parameter dictionary - Maccon.de
Copley amplifier parameter dictionary - Maccon.de

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
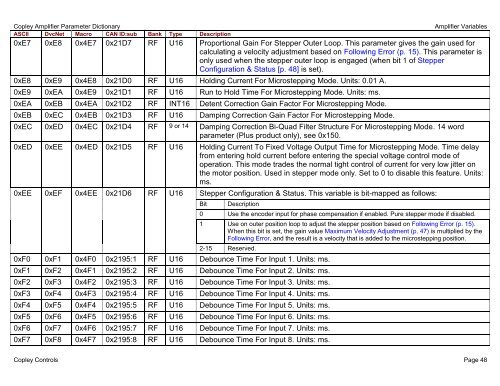
<strong>Copley</strong> Amplifier Parameter Dictionary Amplifier Variables<br />
ASCII DvcNet Macro CAN ID:sub Bank Type Description<br />
0xE7 0xE8 0x4E7 0x21D7 RF U16 Proportional Gain For Stepper Outer Loop. This <strong>parameter</strong> gives the gain used for<br />
calculating a velocity adjustment based on Following Error (p. 15). This <strong>parameter</strong> is<br />
only used when the stepper outer loop is engaged (when bit 1 of Stepper<br />
Configuration & Status [p. 48] is set).<br />
0xE8 0xE9 0x4E8 0x21D0 RF U16 Holding Current For Microstepping Mo<strong>de</strong>. Units: 0.01 A.<br />
0xE9 0xEA 0x4E9 0x21D1 RF U16 Run to Hold Time For Microstepping Mo<strong>de</strong>. Units: ms.<br />
0xEA 0xEB 0x4EA 0x21D2 RF INT16 Detent Correction Gain Factor For Microstepping Mo<strong>de</strong>.<br />
0xEB 0xEC 0x4EB 0x21D3 RF U16 Damping Correction Gain Factor For Microstepping Mo<strong>de</strong>.<br />
0xEC 0xED 0x4EC 0x21D4 RF 9 or 14 Damping Correction Bi-Quad Filter Structure For Microstepping Mo<strong>de</strong>. 14 word<br />
<strong>parameter</strong> (Plus product only), see 0x150.<br />
0xED 0xEE 0x4ED 0x21D5 RF U16 Holding Current To Fixed Voltage Output Time for Microstepping Mo<strong>de</strong>. Time <strong>de</strong>lay<br />
from entering hold current before entering the special voltage control mo<strong>de</strong> of<br />
operation. This mo<strong>de</strong> tra<strong>de</strong>s the normal tight control of current for very low jitter on<br />
the motor position. Used in stepper mo<strong>de</strong> only. Set to 0 to disable this feature. Units:<br />
ms.<br />
0xEE 0xEF 0x4EE 0x21D6 RF U16 Stepper Configuration & Status. This variable is bit-mapped as follows:<br />
Bit Description<br />
0 Use the enco<strong>de</strong>r input for phase compensation if enabled. Pure stepper mo<strong>de</strong> if disabled.<br />
1 Use on outer position loop to adjust the stepper position based on Following Error (p. 15).<br />
When this bit is set, the gain value Maximum Velocity Adjustment (p. 47) is multiplied by the<br />
Following Error, and the result is a velocity that is ad<strong>de</strong>d to the microstepping position.<br />
2-15 Reserved.<br />
0xF0 0xF1 0x4F0 0x2195:1 RF U16 Debounce Time For Input 1. Units: ms.<br />
0xF1 0xF2 0x4F1 0x2195:2 RF U16 Debounce Time For Input 2. Units: ms.<br />
0xF2 0xF3 0x4F2 0x2195:3 RF U16 Debounce Time For Input 3. Units: ms.<br />
0xF3 0xF4 0x4F3 0x2195:4 RF U16 Debounce Time For Input 4. Units: ms.<br />
0xF4 0xF5 0x4F4 0x2195:5 RF U16 Debounce Time For Input 5. Units: ms.<br />
0xF5 0xF6 0x4F5 0x2195:6 RF U16 Debounce Time For Input 6. Units: ms.<br />
0xF6 0xF7 0x4F6 0x2195:7 RF U16 Debounce Time For Input 7. Units: ms.<br />
0xF7 0xF8 0x4F7 0x2195:8 RF U16 Debounce Time For Input 8. Units: ms.<br />
<strong>Copley</strong> Controls Page 48













