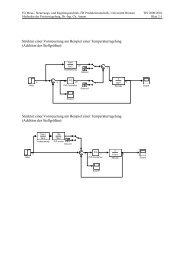
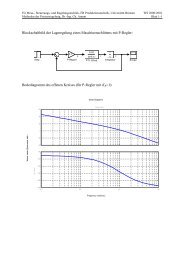
Übung: Reglerentwurf für ein Mehrgrößensystem In einem Walzwerk ...
Übung: Reglerentwurf für ein Mehrgrößensystem In einem Walzwerk ...
Übung: Reglerentwurf für ein Mehrgrößensystem In einem Walzwerk ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
FG Mess-, Steuerungs- und Regelungstechnik, FB Produktionstechnik, Universität Bremen WS 2000/2001<br />
Methoden der Prozessregelung, Dr.-<strong>In</strong>g. Ch. Ament Blatt 11-4<br />
Aufgabenteil c):<br />
» eig(A)<br />
ans =<br />
-0.2500 + 4.4651i<br />
-0.2500 - 4.4651i<br />
-4.2500 + 2.4367i<br />
-4.2500 - 2.4367i<br />
Die Eigenwerte liegen also alle in der stabilen komplexen Halbebene, d.h. das ungeregelte<br />
System ist stabil. Dennoch ist <strong>ein</strong> <strong>Reglerentwurf</strong> sinnvoll, um dem System bessere<br />
dynamische Eigenschaften, z. B. bei Störungen, zu verleihen.<br />
Aufgabenteil d):<br />
Zuerst wird die Steuerbarkeitsmatrix Qr bestimmt. Der Rang von Qr ist 4; das entspricht der<br />
Systemordnung n=4 und das System ist also steuerbar.<br />
» Qr=ctrb(A,B)<br />
Qr =<br />
Columns 1 through 7<br />
0 0 10.0000 0 -45.0000 40.0000 142.5000<br />
0 0 0 10.0000 40.0000 -45.0000 -340.0000<br />
1.0000 0 -0.5000 0 -19.7500 0 99.8750<br />
0 1.0000 0 -0.5000 0 -19.7500 -80.0000<br />
Column 8<br />
-340.0000<br />
142.5000<br />
-80.0000<br />
99.8750<br />
» rank(Qr)<br />
ans =<br />
4<br />
Aufgabenteil e):<br />
Eine "Standardvorgabe" <strong>für</strong> die Gewichtungsmatrizen Q und R <strong>für</strong> den Riccati-Regler sind<br />
Einheitsmatrizen:<br />
» K=lqr(A,B,eye(4),eye(2))<br />
K =<br />
0.1082 0.1279 1.1843 0.7593<br />
0.1279 0.1082 0.7593 1.1843<br />
Aufgabenteil f):<br />
» S=-inv(C*inv(A-B*K)*B)<br />
S =<br />
12.3909 -1.2106<br />
-1.2106 12.3909